39
6.1.2. User Dialog
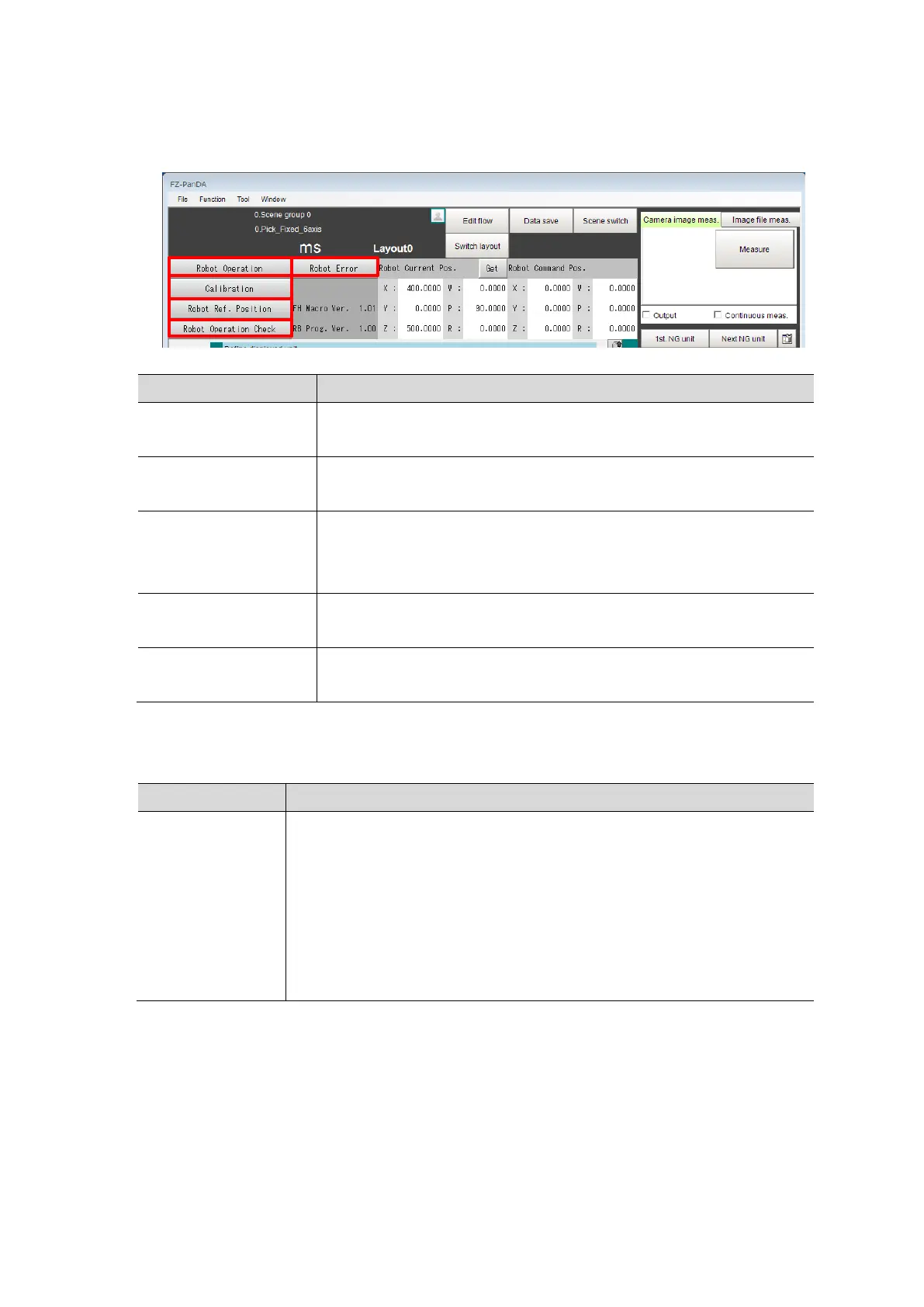
On the Main Window of the Vision Sensor, launch buttons for the user dialog are
arranged like below.
Sets the jog operation, target position movement, and
operation speed and so on.
Calibrates a camera and the robot automatically with
operations of the Vision Sensor.
Registers the reference position of a workpiece and the robot
needed to correctly operate the robot with robot vision
applications.
Checks the setting results of the Vision Sensor by the robot
moved actually.
You can check for an error caused by an operation in the
above dialog.
Terms used in this dialog are defined as follows.
Robot Reference
Position
(Robot Ref.
Position)
Generic name for the reference position of a workpiece and the
robot needed to correctly operate the robot with robot vision
applications.
This consists of Robot Image Position, Workpiece Reference
Position, Robot Grip Position, and Robot Approach Distance.
By registering these, the command position to operate the robot
at executing measurements is correctly output.

 Loading...
Loading...














