This is the workpiece reference position needed to operate the
robot.
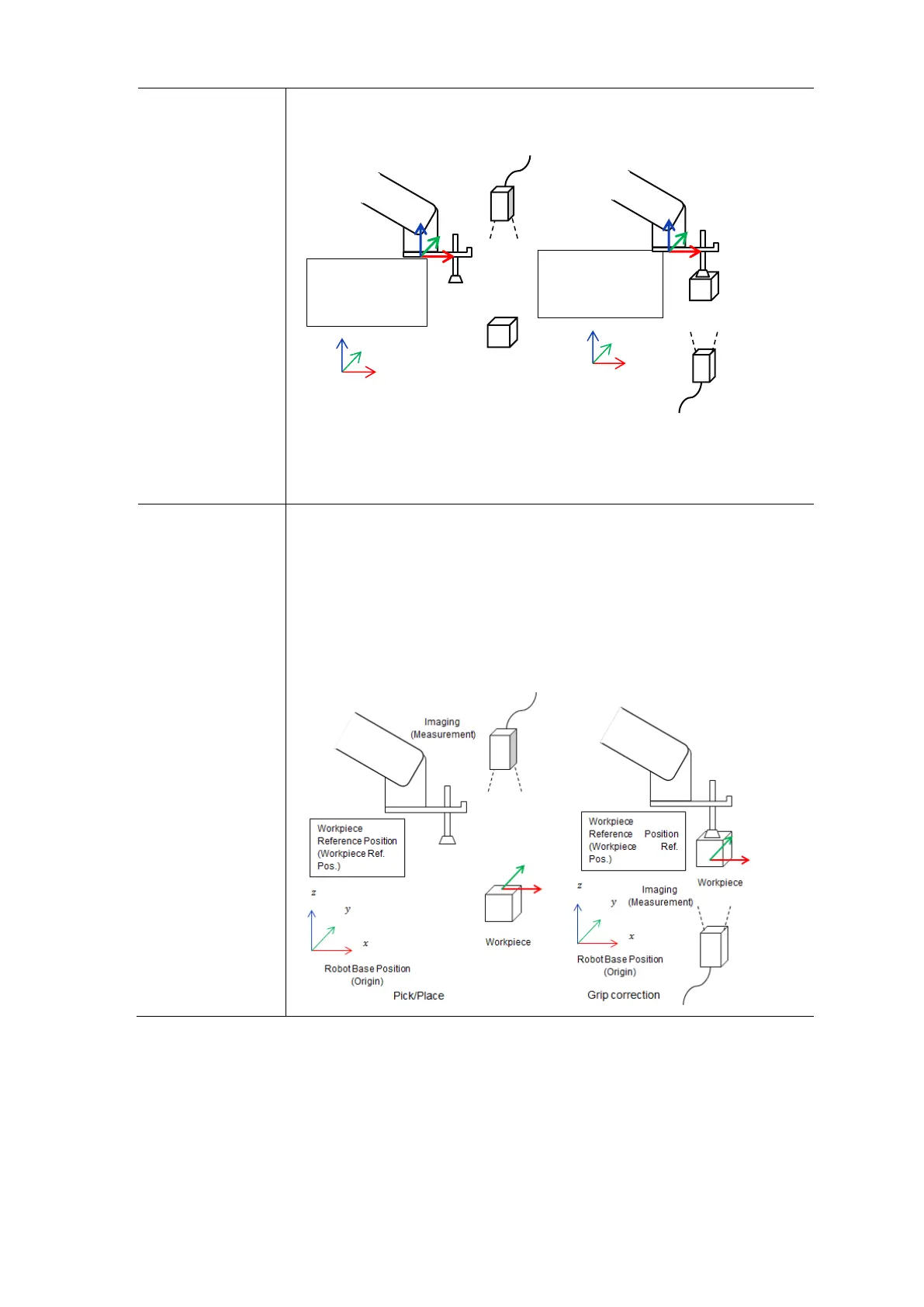
For Pick and Place, this is the reference position of a workpiece
for calculating the relative positional relationship between the
workpiece and the robot.
For Grip Correction, this is the reference position for calculating
an amount of grip deviation.

 Loading...
Loading...














