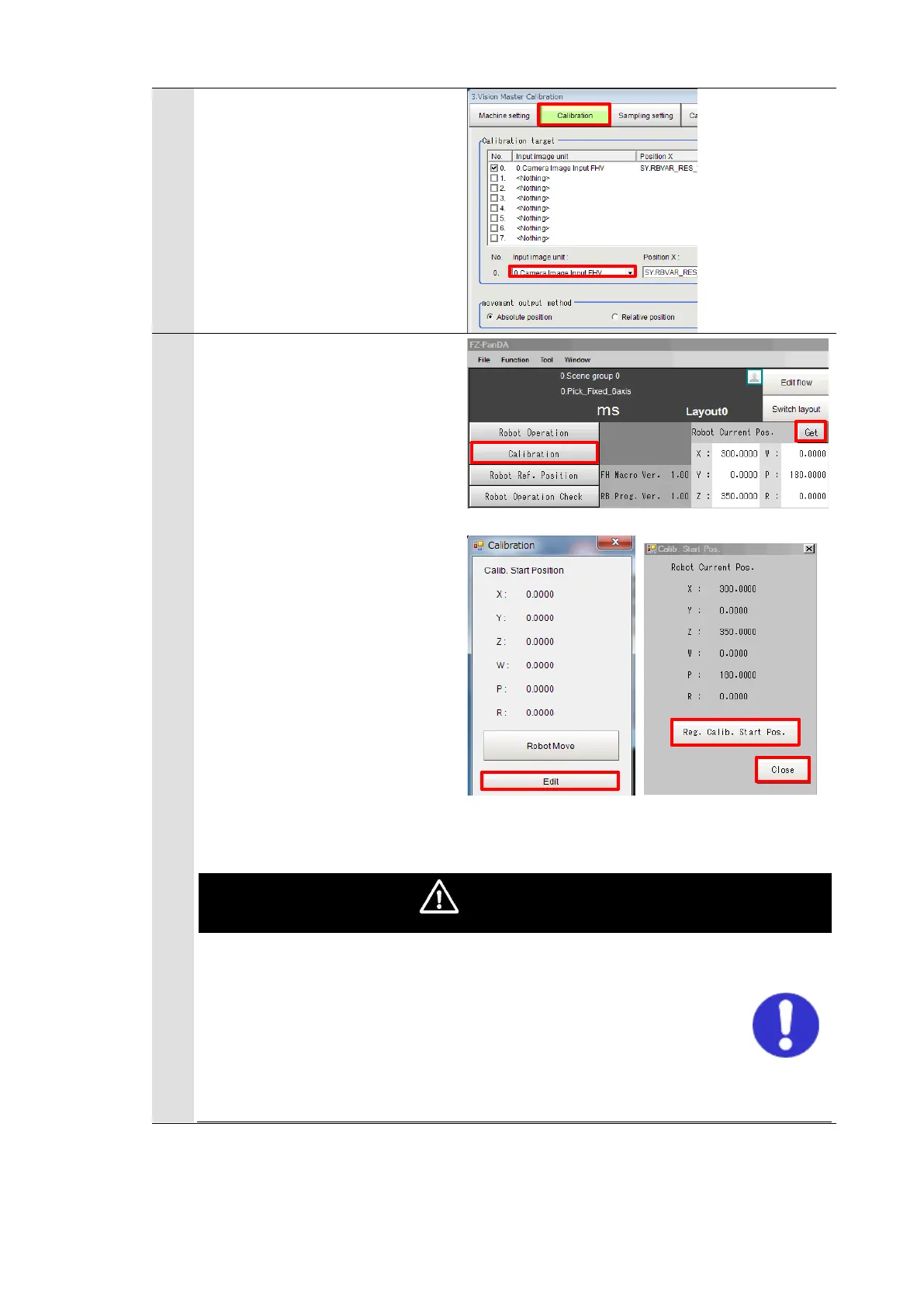
* When using the FHV Series
Smart Camera Vision Sensor,
select the "Calibration" tab and
in the field for "Image Input"
select "Camera Image Input
FHV".
Click [Get] on the Main Window
of the Vision Sensor to get the
current position of the robot.
Click [Calibration] to open the
“Calibration” dialog.
Click [Edit] in the “Calibration”
dialog to open the “Calib. Start
Pos.” dialog.
Check that the dialog displays
the current position of the robot
and click [Reg. Calib. Start
Pos.].
After clicking [Close], check
that the “Calib. Start Position”
in the “Calib. Start Pos.” dialog
has been updated.
An operation of the dialog will automatically set values to Scene
and System variables previously set in the scenes loaded by the
environment copy feature in Chapter 5.1. Do not directly set the
values by TDM editor or setting screens for processing items.
If proceeding to the following steps without registering the
calibration start position, the robot would produce unexpected
motion. Please be sure to register the position.

 Loading...
Loading...














