35
3
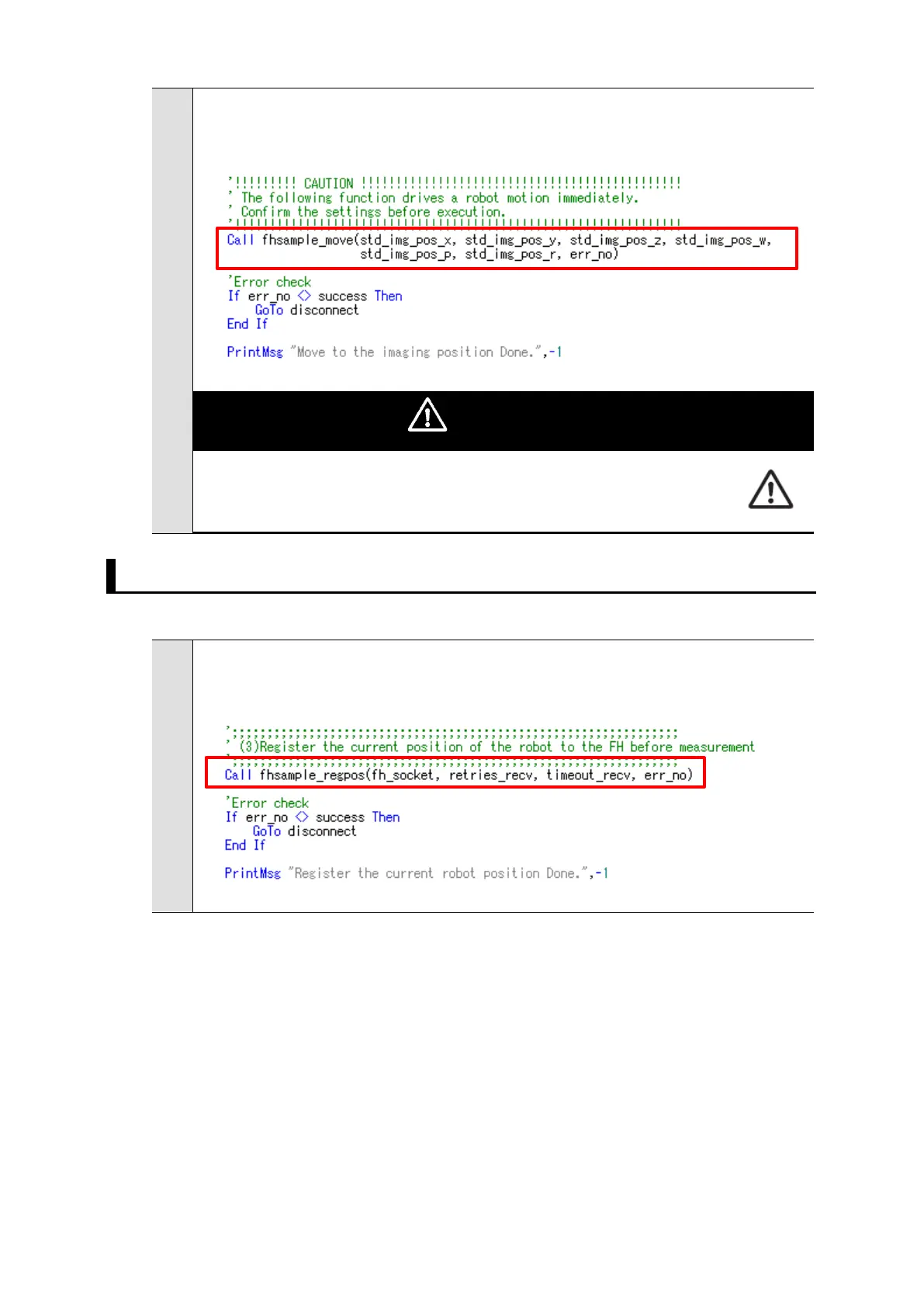
Set the variables as arguments for the robot motion sample function
(fhsample_move) and execute it.
WARNING
These operations drive the robot.
Operate the robot in the state whereby pressing the
[Emergency stop] button can stop its motion anytime.
6.4. Register the Current Robot Position in the Vision Sensor
To register the current robot position to the Vision Sensor, use "fhsample_regpos".
1
Before executing measurements, execute the current position registration
command execution function (fhsmaple_regpos) to the Vision Sensor.
Current position registration command execution sample function
Robot motion sample function

 Loading...
Loading...














