6. EtherNet/IP Settings
13
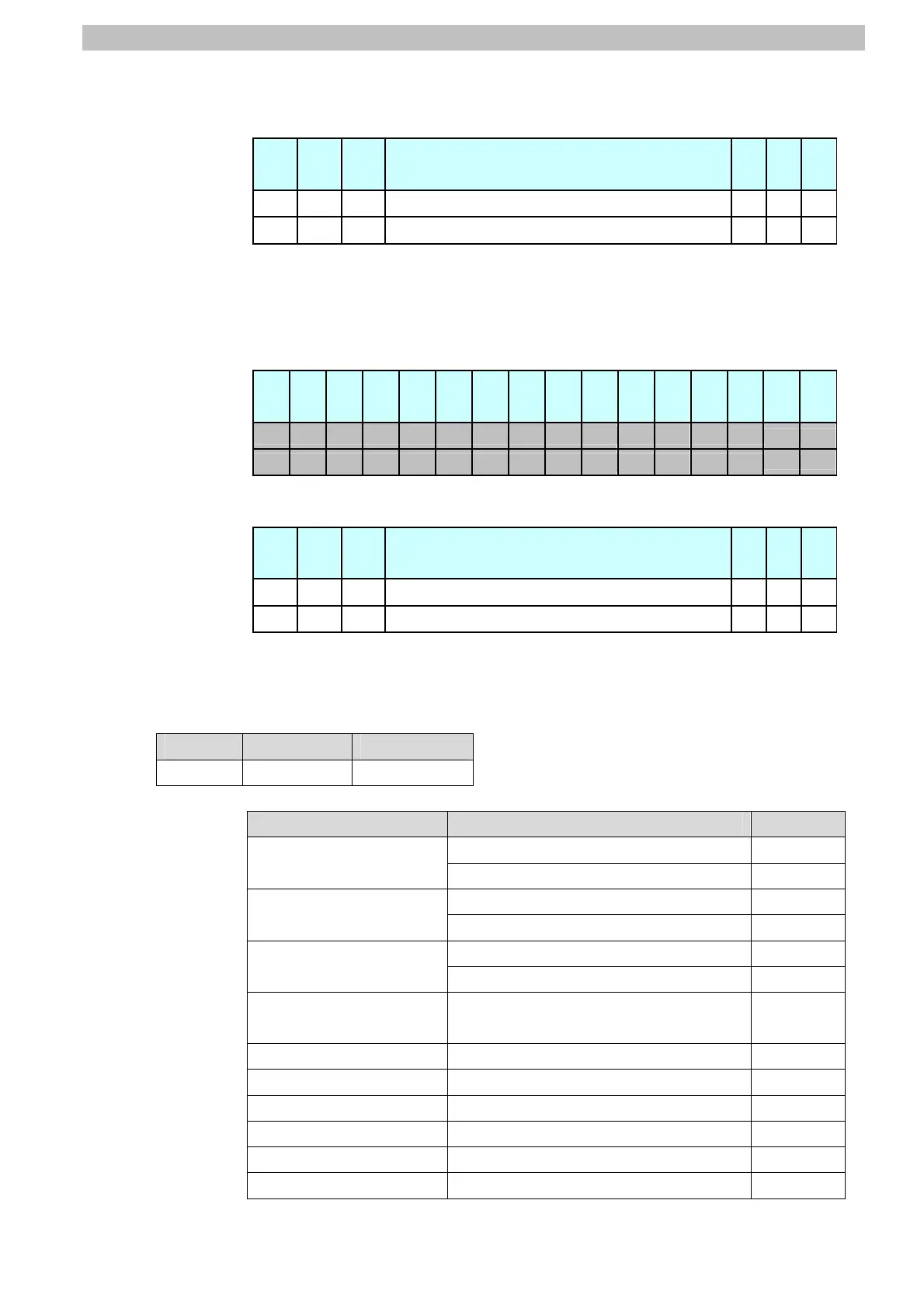
Allocation of EIPOutput.SensorHead1ControlFlag.W variable
Offset
(word)
15 14 13 … 2 1 0
+2 15 14 13 … 2 1 0
+3 31 30 29 … 18 17 16
Bits 31 to 0: EIPOutput.SensorHead1ControlFlag.W uses DWORD data from
offset +2 words.
*6: Details on allocation of sensor head 2 control signal (reserved)
Allocation of EIPOutput.SensorHead2ControlReserve.F variable
Offset
(word)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
+4
+5
Allocation of EIPOutput.SensorHead2ControlReserve.W variable
Offset
(word)
15 14 13 … 2 1 0
+4 15 14 13 … 2 1 0
+5 31 30 29 … 18 17 16
Bits 31 to 0: EIPOutput.SensorHead2ControlReserve.W uses DWORD data
from offset + 4 word.
■Input area (Controller ← Displacement Sensor)
Variable Data type Data size
EIPInput S_EIPInput 56 bytes
Offset (word) Destination device data Name Data type
EIPInput.CommonStatusFlag.F
*4
BOOL[32]
+0 and +1
Control output 1
*1
(32 bits)
(Data type: U_EIPFlag)
EIPInput.CommonStatusFlag.W
*4
DWORD
EIPInput.SensorHead1StatusFlag.F
*5
BOOL[32]
+2 and +3
Control output 2
*2
(32 bits)
(Data type: U_EIPFlag)
EIPInput.SensorHead1StatusFlag.W
*5
DWORD
EIPInput.SensorHead2StatusReserve.F
*6
BOOL[32]
+4 and +5
Control output 3
*3
(32 bits)
(Data type: U_EIPFlag)
EIPInput.SensorHead2StatusReserve.W
*6
DWORD
+6 and +7
Command code
(CMD-CODE)
EIPInput.CommandCodeEcho DWORD
+8 and +9 Response code (RES-CODE) EIPInput.ResponseCode UDINT
+10 and +11 Response data (RES-DATA) EIPInput.ResponseData DINT
+12 and +13 Output data 0 (DATA0) EIPInput.MeasurementValueofTask1 DINT
+14 and +15 Output data 1 (DATA1) EIPInput.MeasurementValueofTask2 DINT
+16 and +17 Output data 2 (DATA2) EIPInput.MeasurementValueofTask3 DINT
+18 and +19 Output data 3 (DATA3) EIPInput.MeasurementValueofTask4 DINT

 Loading...
Loading...












