Appendices
A - 74
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• The bits in the physical outputs of this object set the outputs of function signals allocated by servo
parameters 3400 to 3407, 3410, and 3411 hex.
• The bit mask sets masks for the physical outputs.
Settings for Sub-index 01 hex
*1 This bit cannot be used for NJ301-/NJ501- and CJ1W-NC 8 .
*2 Set all Reserved bits to 0.
• The gain can be switched when realtime autotuning is disabled and Gain 2 is enabled.
• Speed loop P/PI control can be switched when realtime autotuning and Gain 2 are disabled.
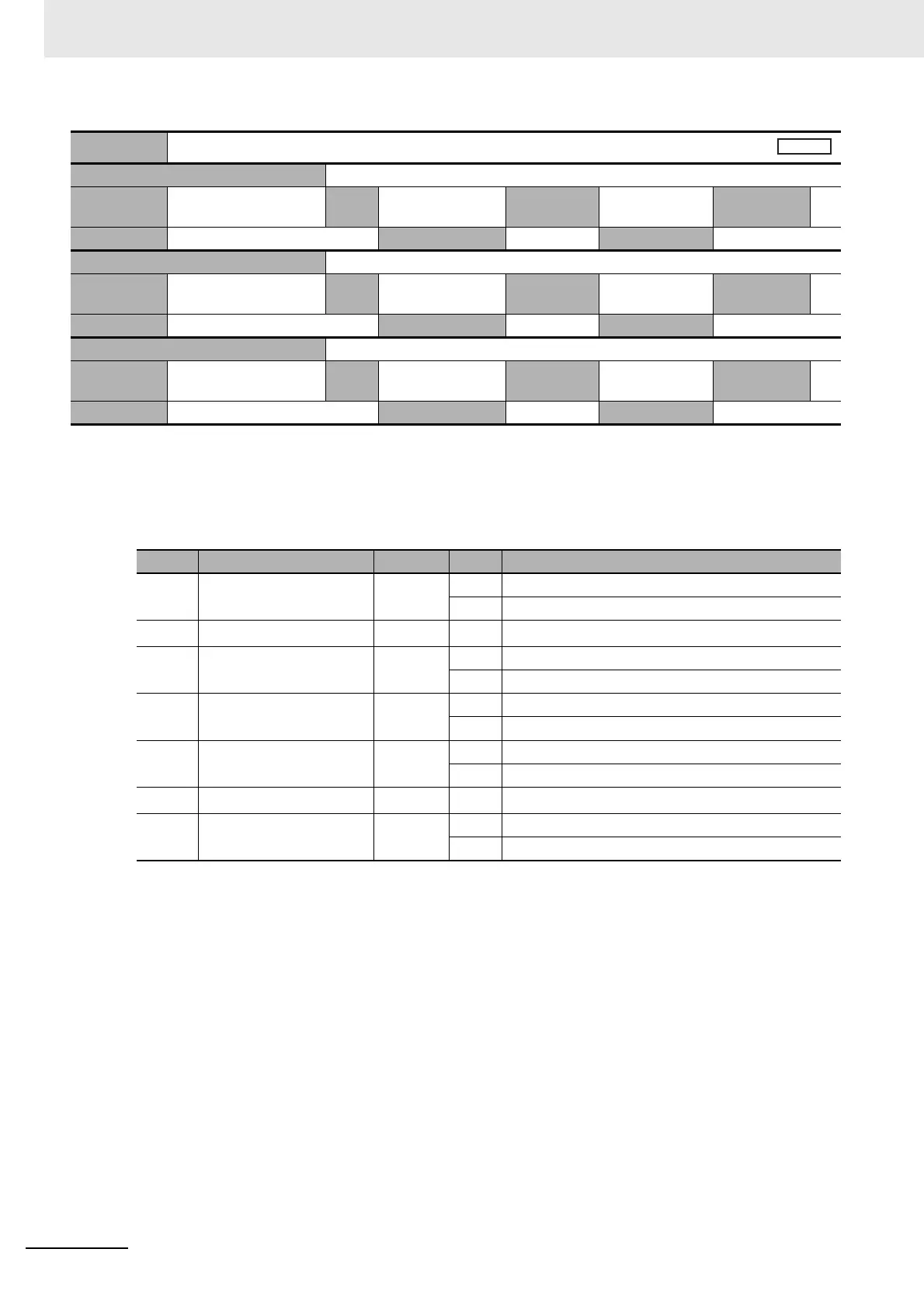
60FE hex
Digital outputs
Sub-index 00 hex Number of entries
Setting
range
–
Unit
–
Default
setting
02 hex Data
attribute
–
Size 1 byte (U8) Access RO PDO map Not possible
Sub-index 01 hex Physical outputs
Setting
range
0000 0000 to
FFFF FFFF hex
Unit
–
Default
setting
0000 0000 hex Data
attribute
A
Size 4 bytes (U32) Access RW PDO map Possible
Sub-index 02 hex Bit mask
Setting
range
0000 0000 to
FFFF FFFF hex
Unit
–
Default
setting
0000 0000 hex Data
attribute
B
Size 4 bytes (U32) Access RW PDO map Not possible
Bit Signal name Symbol Value Description
0 Set brake (Brake Interlock
Output)
*1
BKIR 0 don’t set brake
1 set brake
1 to 15
Reserved
*2
–0 –
16 Remote Output 1 R-OUT1 0 OFF
1ON
17 Remote Output 2 R-OUT2 0 OFF
1ON
24 Gain Switching G-SEL 0 Gain 1
1 Gain 2
25
Reserved
*2
–0 –
26 Speed Loop P/PI Control P/PI 0 PI control
1 P control

 Loading...
Loading...
