A - 75
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-12 Servo Drive Profile Objects
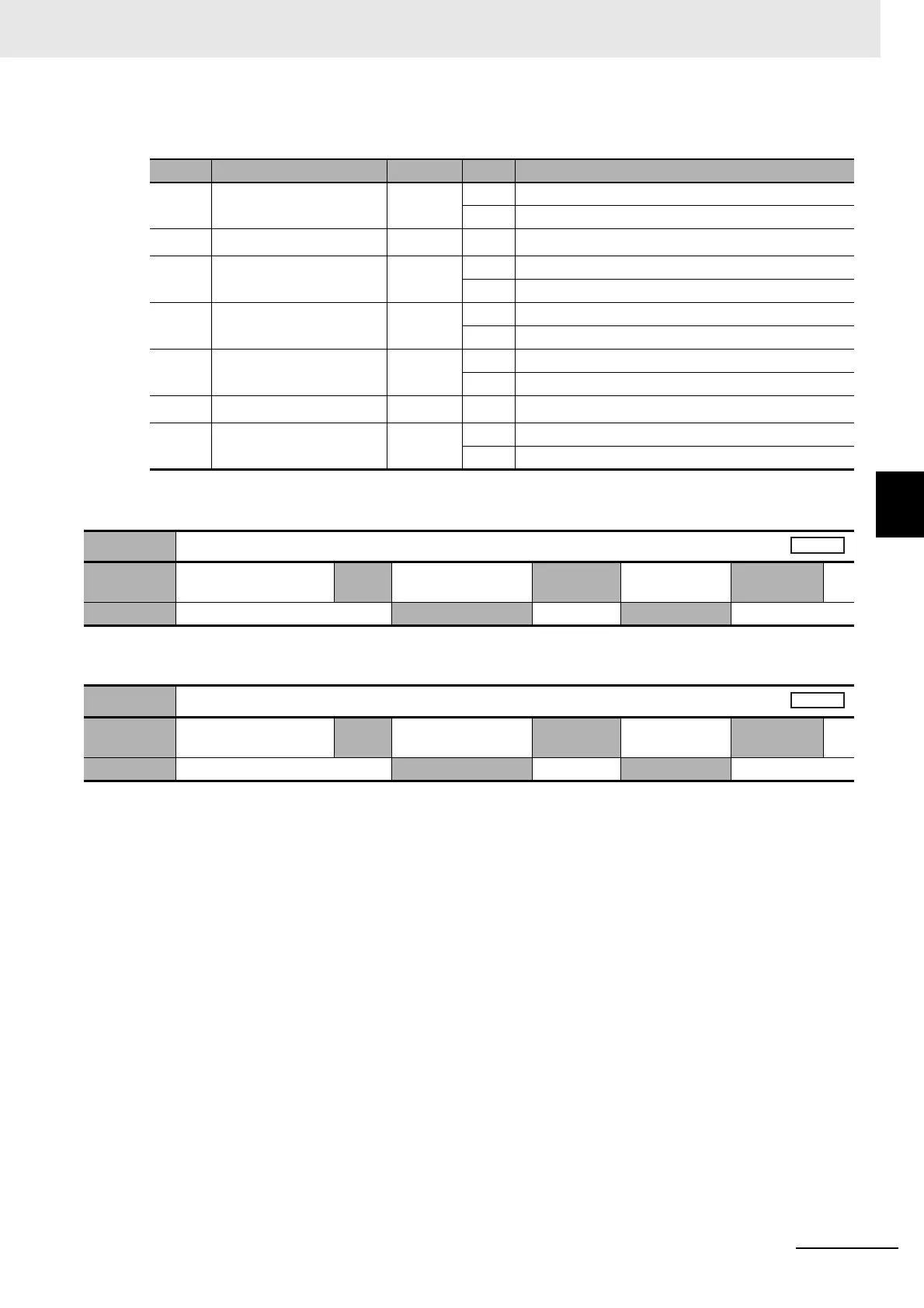
Settings for Sub-index 02 hex
*1 Set all Reserved bits to “0”.
• Set the command speed for the Cyclic synchronous velocity.
• This object indicates the type of motor that is connected.
• It is always 3 (PM synchronous motor) for G5-series Servo Drives.
Bit Signal name Symbol Value Description
0 Set brake Mask (Brake
Interlock Output Mask)
BKIR 0 Set brake disable output
1 Set brake enable output
1 to 15
Reserved
*1
–0 –
16 Remote Output 1 Mask R-OUT1 0 R-OUT1 disable output
1 R-OUT1 enable output
17 Remote Output 2 Mask R-OUT2 0 R-OUT2 disable output
1 R-OUT2 enable output
24 Gain Switching Mask G-SEL 0 Switch setting disable
1 Switch setting enable
25
Reserved
*1
–0 –
26 Speed Loop P/PI Control
Mask
P/PI 0 Switch setting disable
1 Switch setting enable
60FF hex
Target velocity
Setting
range
–2,147,483,647 to
2,147,483,647
Unit
Command unit/s
Default
setting
0 Data
attribute
A
Size 4 bytes (INT32) Access RO PDO map Possible
6402 hex
Motor type
Setting
range
–
Unit
–
Default
setting
3 Data
attribute
–
Size 2 bytes (U16) Access RO PDO map Not possible

 Loading...
Loading...
