The following parameters are adjustable: Speed Loop Gain (Pn11 and Pn19), Speed Loop
Pn1C).
Change to Parameter Write Mode, and write to EEPROM.
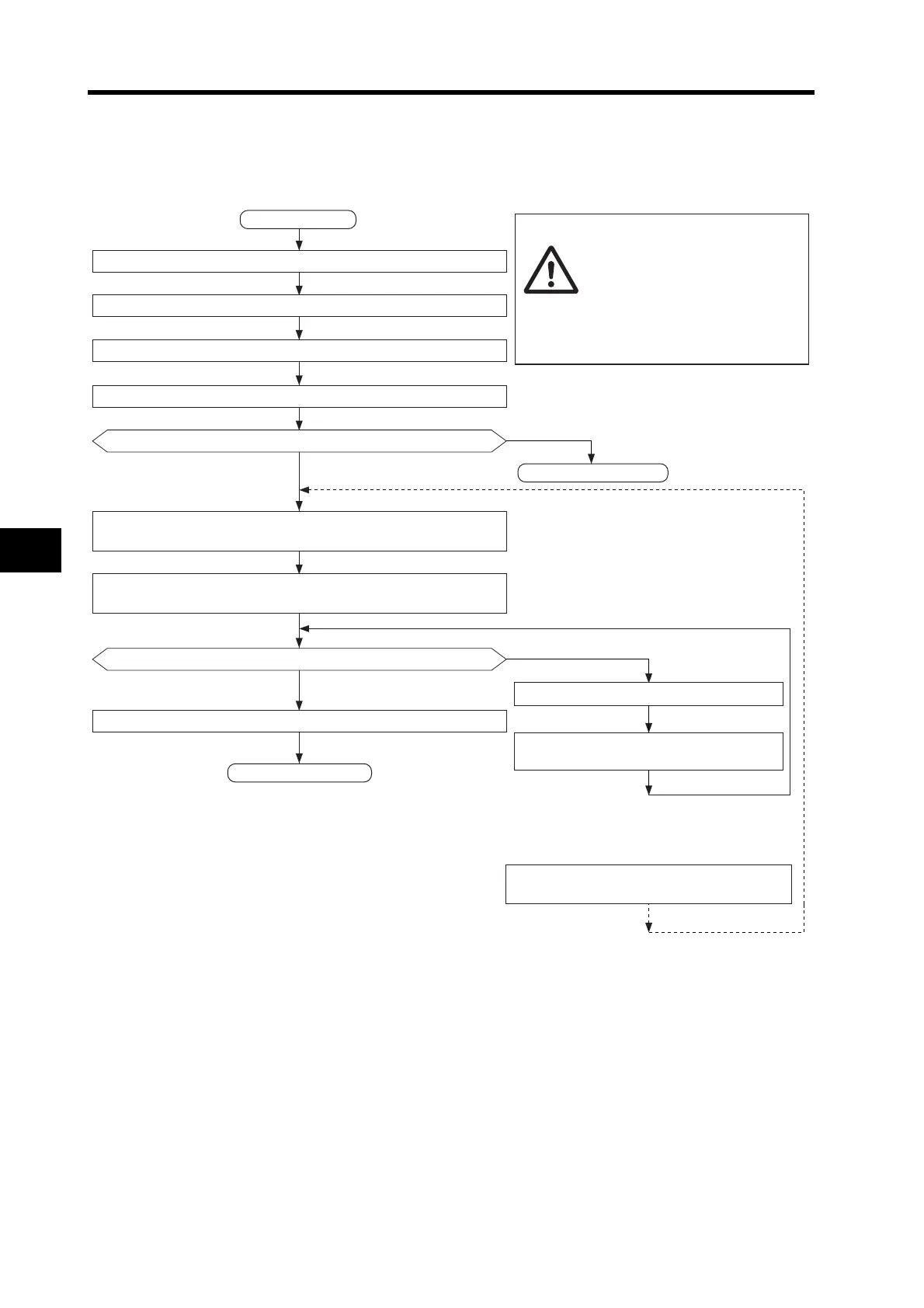
Start adjustment
Ye s
No
Adjustment complete
Disable realtime autotuning. (Pn21 = 0 or 7)
Set parameters Pn11, Pn12 and Pn14 to the values in table 1.
Set the Inertia Ratio (Pn20). (Calculated value at Servomotor selection.)
Run under actual operating pattern and load.
Speed responsiveness and other operational performance satisfactory?
Adjustment completed
Increase the Speed Loop Gain (Pn11),
but not so much that it causes hunting when the servo is locked.
Reduce the Speed Loop Integration Time Constant (Pn12),
but not so much that it causes hunting when the servo is locked.
Any hunting (vibration) when the Servomotor rotates?
No
Reduce the Speed Loop Gain (Pn11)
Increase the Speed Loop Integration
Time Constant (Pn12)
Ye s
If vibration does not stop no matter how many
times you perform adjustments, or if positioning
is slow:
Increase the Torque Command Filter Time
Constant (Pn14).
Do not perform extreme adjustment
and setting changes. They may
destabilize operation, possibly
resulting in injury.
Adjust the gain a little at a time
while checking the Servomotor
operation.
 Loading...
Loading...




