Servo system principles Section 1-4
15
The output speed gain can be useful for smoothing motions but will
generate high Following Errors. The output speed gain axis parameter is
called OV_GAIN.
• Speed feed forward gain
The speed feedforward gain K
vff
produces an output O
vff
that is
proportional to the change in demand position P
d
and minimizes the
Following Error at high speed.
O
vff
= K
vff
· ∆P
d
The parameter can be set to minimise the Following Error at a constant
machine speed after other gains have been set. The speed feed forward
gain axis parameter is called VFF_GAIN.
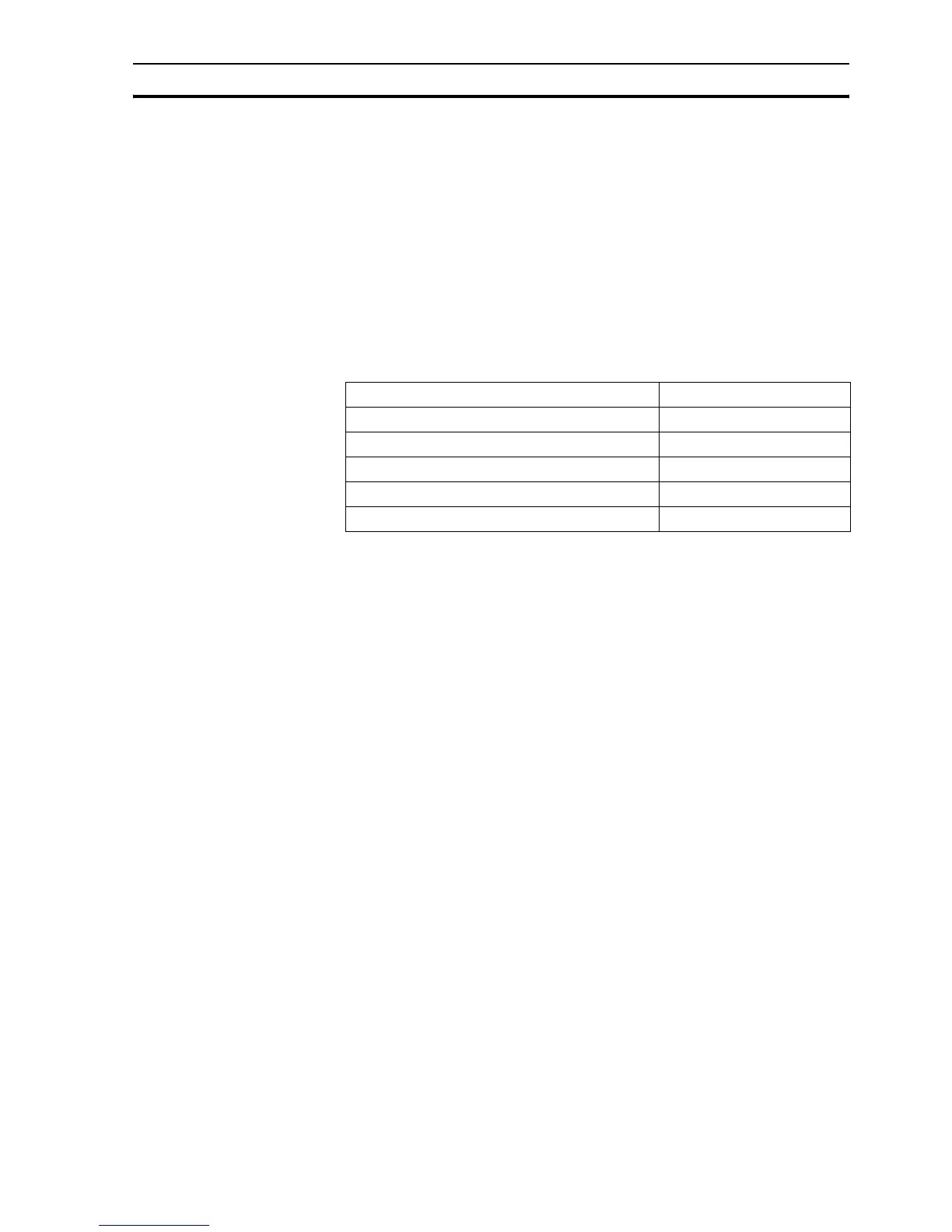
The default settings are given in the table along with the resulting profiles.
Fractional values are allowed for gain settings.
/i
Gain Default value
Proportional gain 0.1
Integral gain 0.0
Derivative gain 0.0
Output speed gain 0.0
Speed feedforward gain 0.0
 Loading...
Loading...









