How-to’s Section 5-1
319
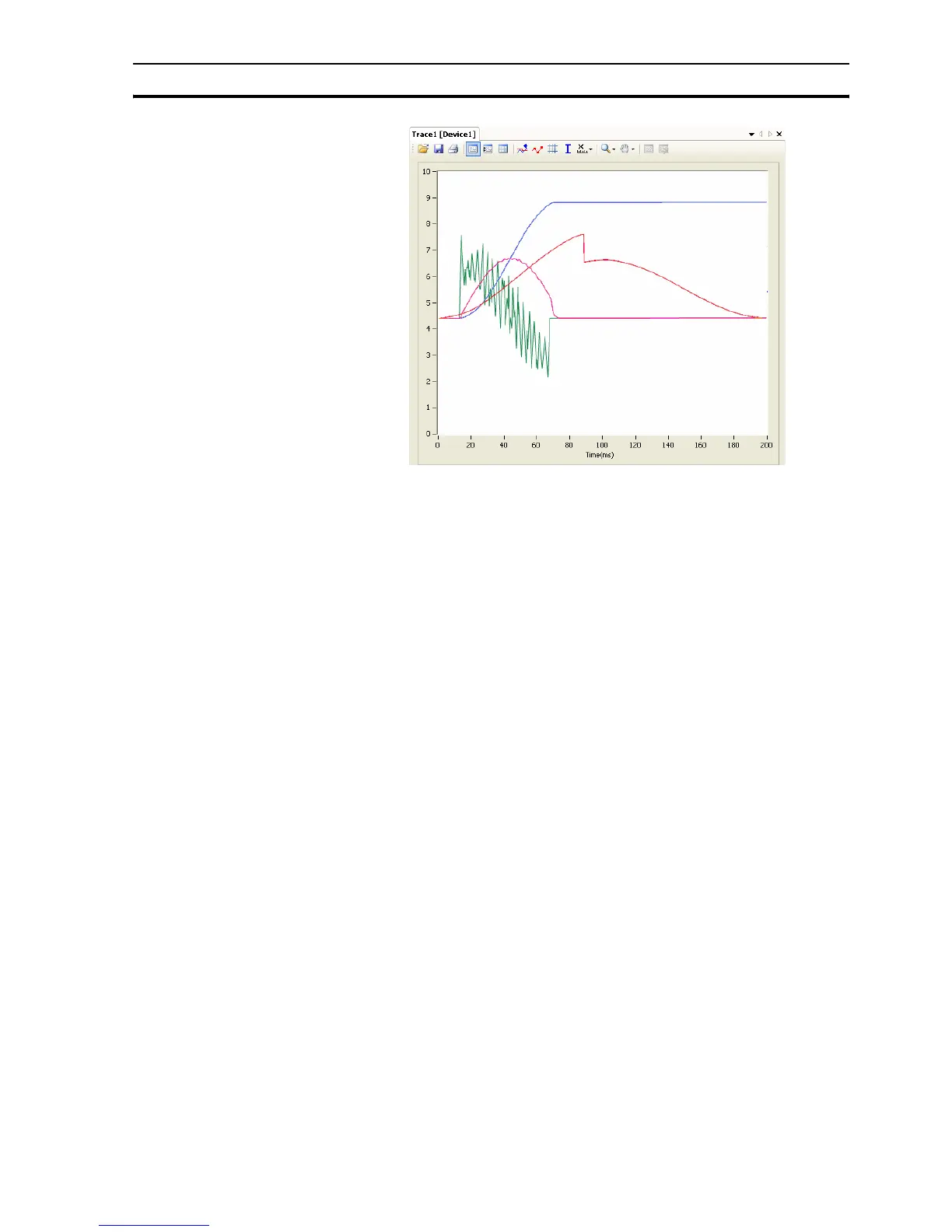
The result is given in the figure. The red graph clearly shows a discontinuity in
the position values that the slave axis must follow. Because the speed is a
derivative of the position, at the point of discontinuity of the position curve the
speed gets a high value. (This value equals infinity in theory, in practice the
value is just very big). This causes the error. The red graph shows where the
root of the problem is. The amplitude of the cosine curve, and therefore the
end_pos parameter, has been changed during the execution of the CAMBOX
command. The solution is simple: A change of the end_pos parameter during
CAMBOX execution must be prevented. To do this, either modify the
programs in Trajexia, or in some other controller (if the parameter is changed
outside of the scope of the application programs, for example by a FINS
message).
Note The time base of the CAM TABLE points is not the same as the capture of the other sig-
nals. The discontinuity in the CAM (red graph) coincides in time with the interruption of
the movement. To analyze this, check the position values individually with a spread-
sheet program. To analyze the point values in detail, you can export the TABLE points
to a spreadsheet program for a more complex analysis.
 Loading...
Loading...









