Hardware Specification
157
For non-porous materials, the OnRobot suction cups are highly recommended. Some of the most common
non-porous materials are listed below:
• Composites
• Glass
• High density cardboard
• High density paper
• Metals
• Plastic
• Porous materials with a sealed surface
• Varnished wood
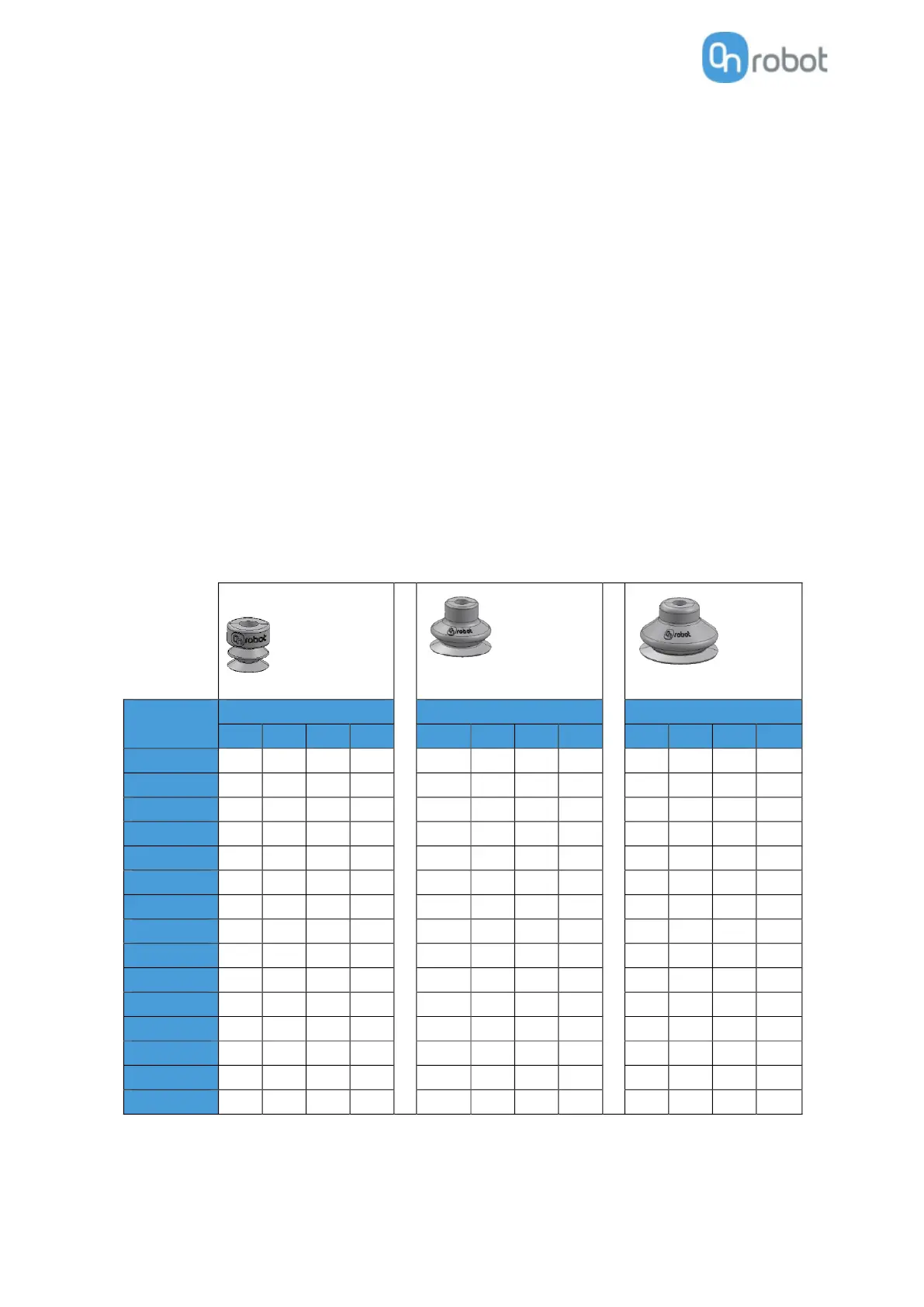
In an ideal case, working with non-porous material workpieces where there are no air flow going through
the workpiece, the table below shows the number of cups and the cup size needed depending on the
payload (workpiece mass) and the vacuum used.
Number of Cups needed for non-porous materials depending on payload and vacuum:
 Loading...
Loading...







