Operation
34
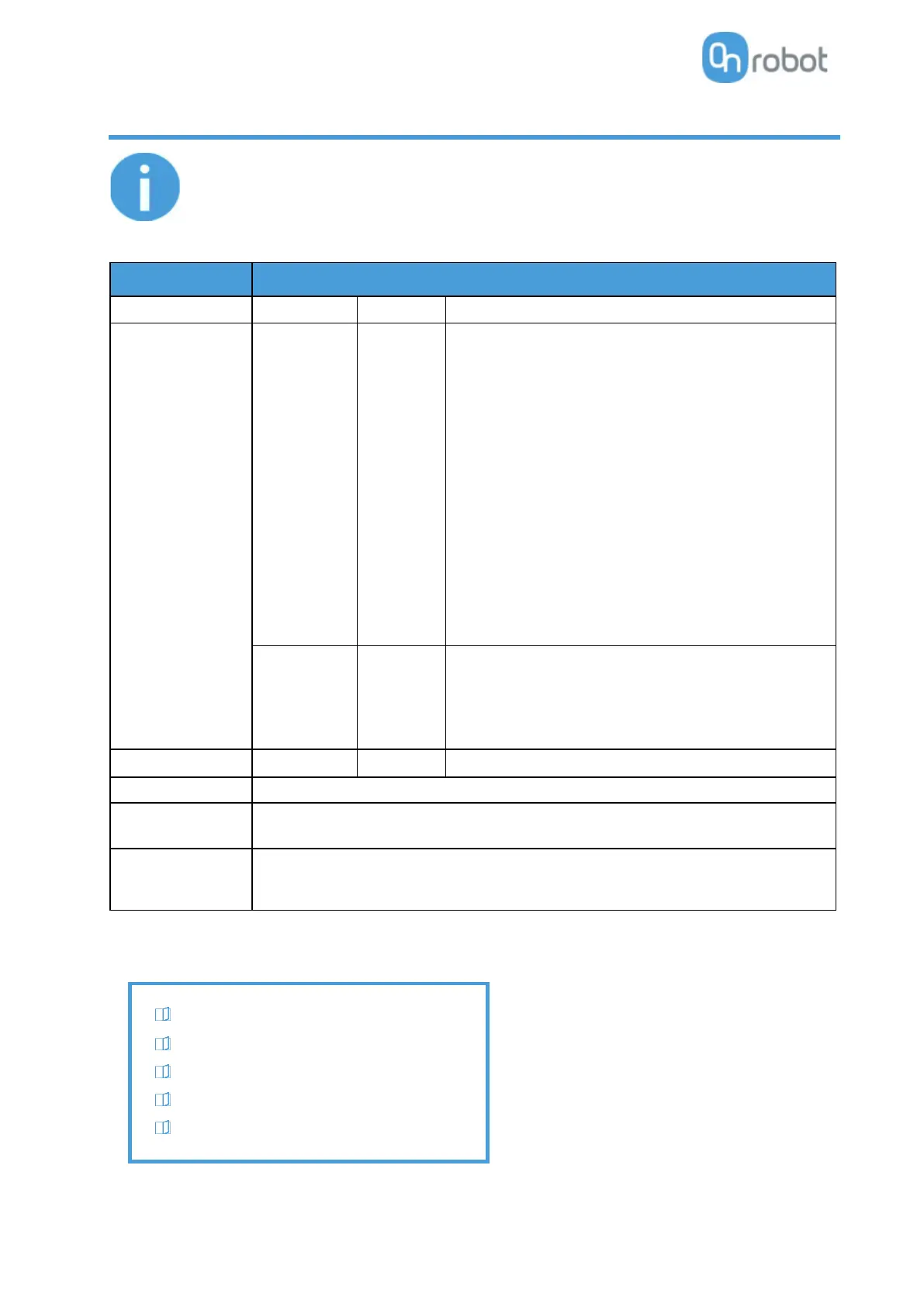
5.2 List of functions
To call a function (user procedure) all inputs shall be defined as a variable
first, since numbers cannot be used directly.
OR_init(toolCfgID, fieldbusCH)
Tool configuration ID:
Primary Secondary
101 - RG2FT -
102 - RGx -
103 - VGx -
104 - Gecko -
105 HEX - -
106 HEX RGx -
107 HEX VGx -
108 HEX Gecko -
109 - RGx VGx
110 - RGx Gecko
111 - RGx RGx
112 - VGx RGx
113 - VGx Gecko
114 - VGx VGx
Fieldbus channel:
1 if Channel 1 is used
2 if Channel 2 is used
3 if Channel 3 is used
4 if Channel 4 is used
Function to initialize the communication for the currently used tools.
Make sure, that this function is called before using all other function.
cfgID = 107 ‘ HEX used with VGx
fbCH = 1 ‘Fieldbus channel 1 is used
CallProc OR_init(cfgID, fbCH)
Gecko .............................................. 35
HEX-E/H QC ..................................... 38
RG2-FT ............................................ 39
RG2/6.............................................. 43
VG10 / VGC10.................................. 45