Resonance Mechanical resonance is caused by springiness between motor
inertia and load inertia. This may result from belts, flexible
couplings, or the torsion stiffness of shafts. In general, the
stiffer the couplings, the higher the resonance frequency and
the easier it is to tune the system for good performance.
If the velocity loop breaks into an oscillation at a frequency well
above the calculated velocity loop bandwidth, a resonance
problem may well exist. A second symptom is that the frequency
of oscillation is relatively constant in the presence of changes to
ARF0 and ARF1.
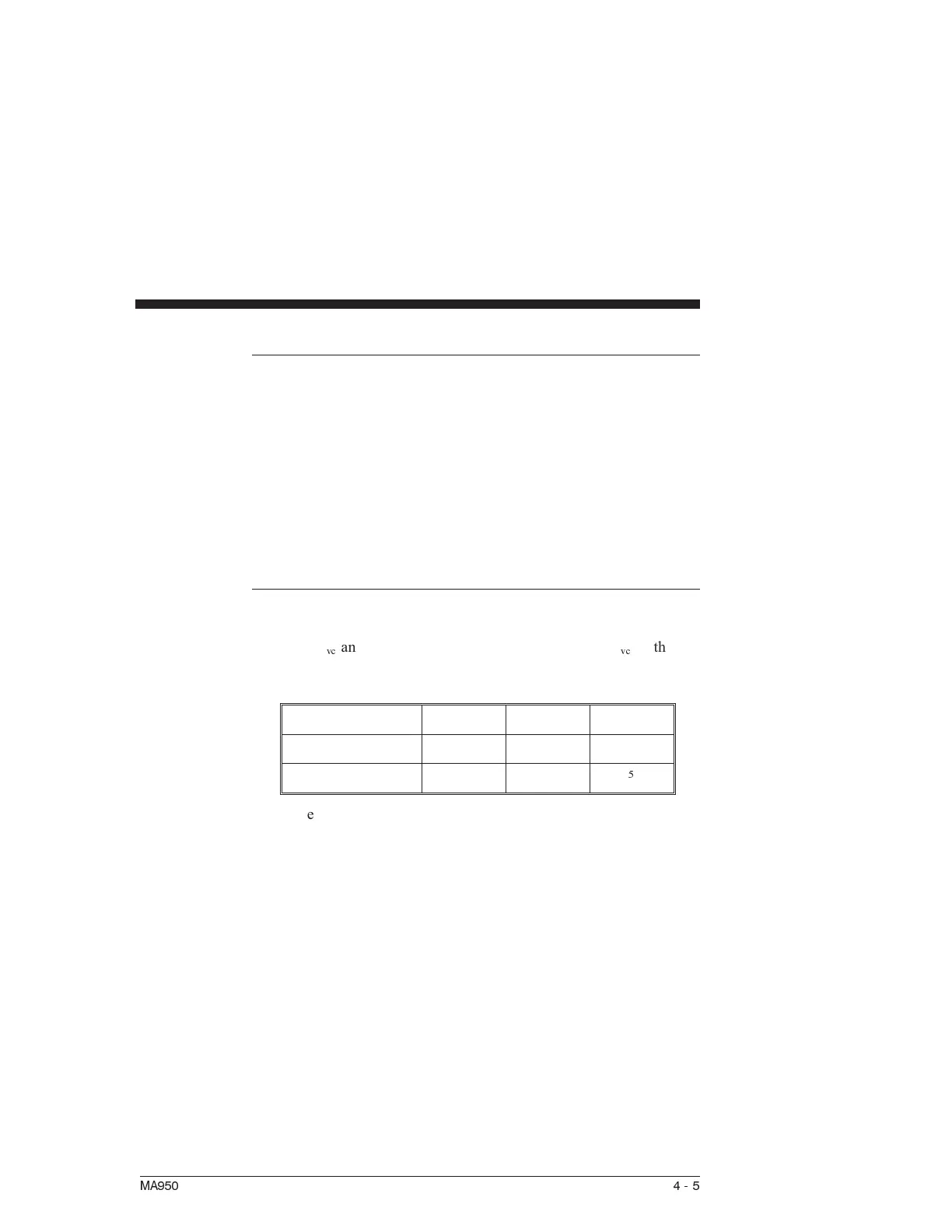
ARF0 & ARF1 Two digital anti-resonant low-pass filters ARF0 and ARF1 are
included in the velocity loop. Their purpose is to lower the gain
above f
vc
and especially at any resonant frequency > f
vc
so that
oscillations do not occur. Default values, also a function of the
selected system response, are shown below:
Gentle Medium Stiff
ARF0 (Hz) 100 150 1500
ARF1 (Hz) 200 750 1x10
5
If the velocity loop bandwidth cannot be raised to an acceptable
value without encountering a resonant oscillation, the procedure
on the following page is recommended.
MA950 4-5