KVFF KVFF is the velocity feed forward gain. In the absence of
velocity feed forward (KVFF = 0), the commanded velocity is
proportional to the position (following) error. This means that the
actual position will lag the commanded position by a value
proportional to the speed. The error will be smaller for larger
values of KPP.
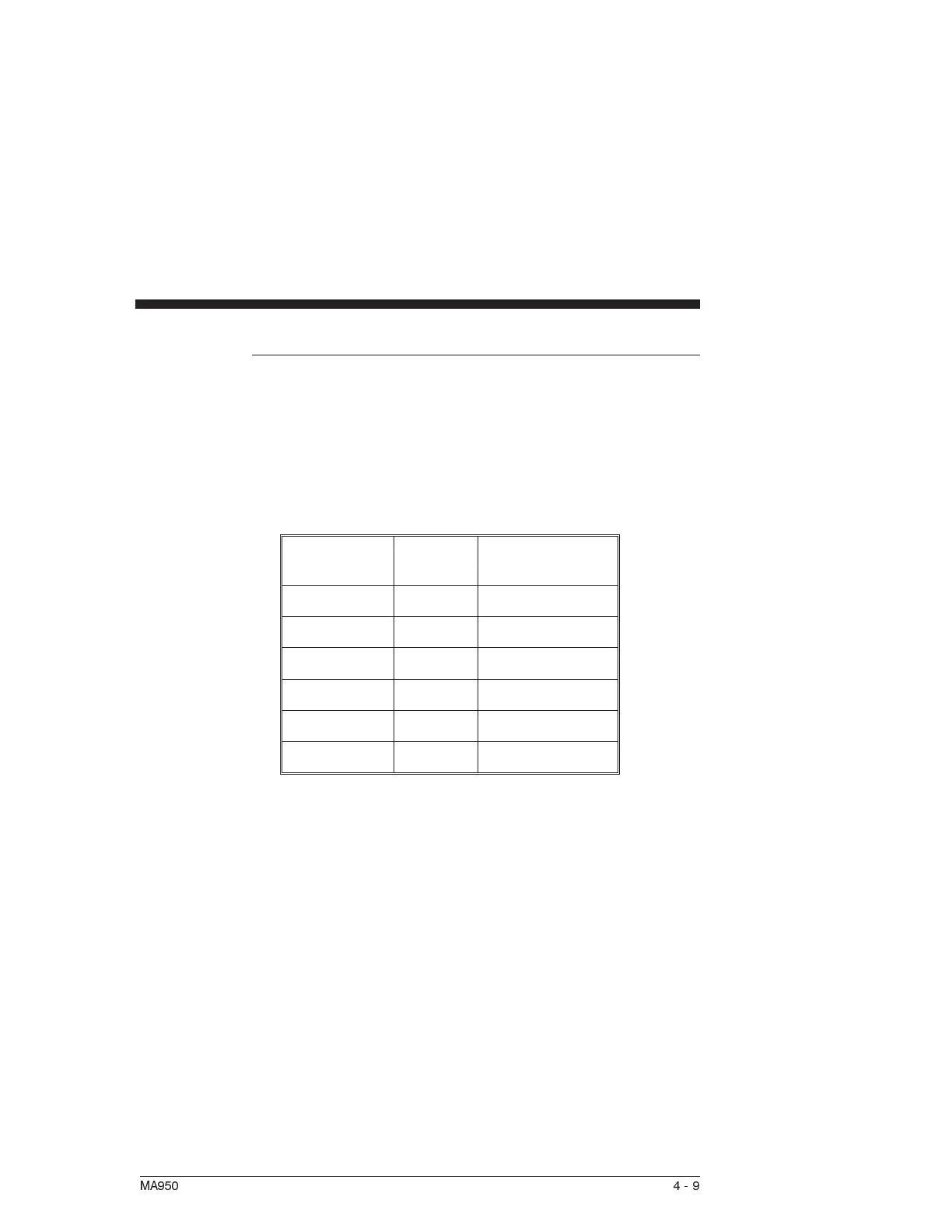
The following table gives a feel for the following error
magnitude.
Speed (rpm) KPP (Hz) Following Error
(revolutions)
1000 10 0.27
2000 10 0.53
5000 10 1.33
1000 20 0.13
2000 20 0.27
5000 20 0.66
Note: The following error can easily exceed one complete motor
revolution. In many electronic gearing applications, such
following errors are not acceptable (real gears don’t have
following errors!) Also, stepper systems don’t have such errors.
Feed forward takes advantage of the fact that the SC900 DSP
knows the frequency of the encoder or step inputs and hence
knows how fast the motor should be going at a given instant. All
or part of this velocity can be added to the velocity command to
reduce following error. If KVFF is set to 100 (%), then the
steady state following error reduces to zero.
MA950 4-9