Page 162 · Robotics with the Boe-Bot
P1.
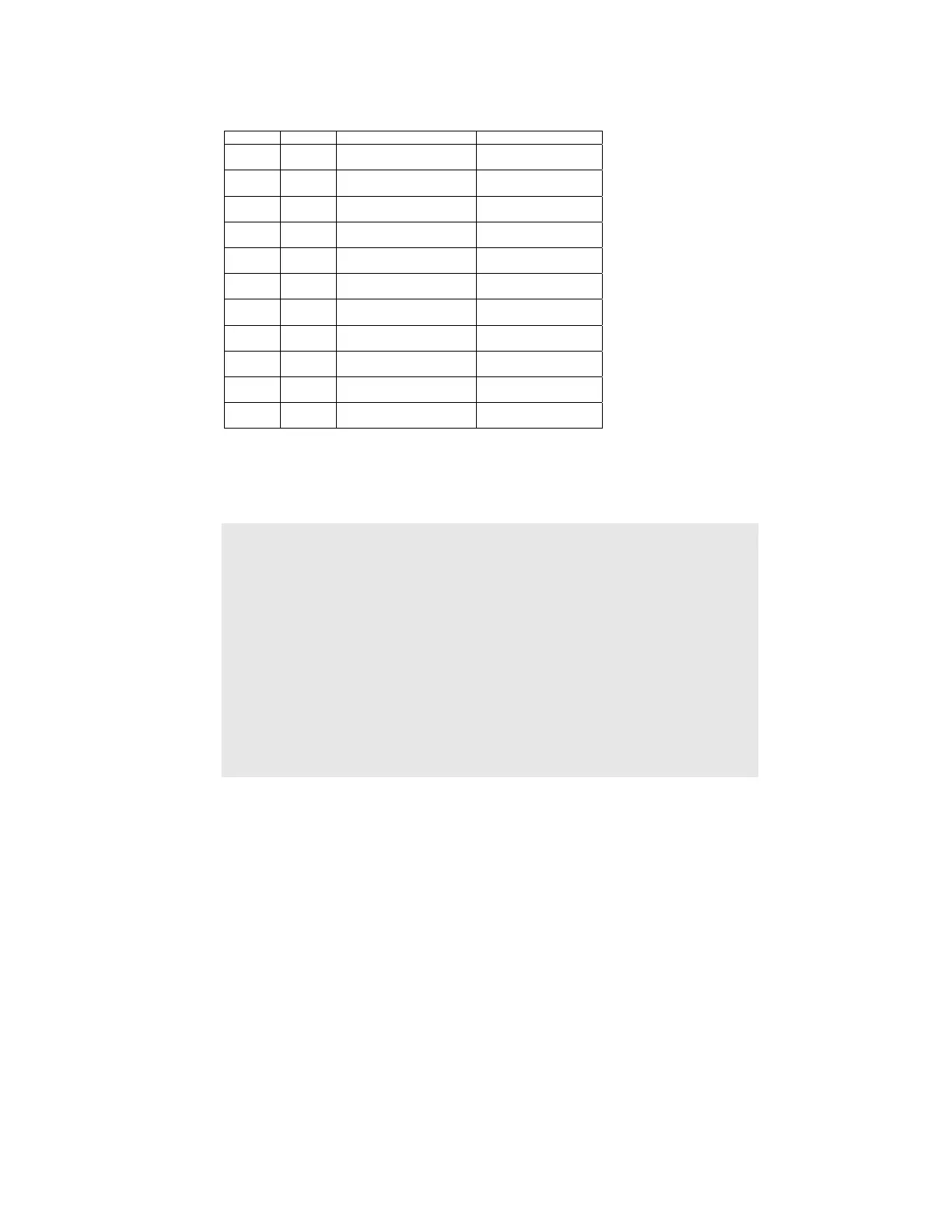
P13 P12 Description Behavior
850 650 Full Speed
P13 CCW, P12 CW
Forward
650 850 Full Speed
P13 CW, P12 CCW
Backward
850 850 Full Speed
P13 CCW, P12 CCW
Right rotate
650 650 Full Speed
P13 CW, P12 CW
Left rotate
750 850 P13 Stopped
P12 CCW Full speed
Pivot back left
650 750 P13 CW Full Speed
P12 Stopped
Pivot back right
750 750 P13 Stopped
P12 Stopped
Stopped
760 740 P13 CCW Slow
P12 CW Slow
Forward slow
770 730 P13 CCW Med
P12 CW Med
Forward medium
850 700 P13 CCW Full Speed
P12 CW Medium
Veer right
800 650 P13 CCW Medium
P12 CW Full Speed
Veer left
P2. The circle can be implemented by veering right continuously. Trial and error, a
yard or meter stick, will help you arrive at the right
PULSOUT value. Circle with a
one-yard diameter:
' Robotics with the Boe-Bot - Chapter 4 - Circle.bs2
' Boe-Bot navigates a circle of 1 yard diameter.
'{$STAMP BS2}
'{$PBASIC 2.5}
DEBUG "Program running!"
pulseCount VAR Word ' Pulse count to servos
FREQOUT 4, 2000, 3000 ' Signal program start/reset.
' -----[ Main Routine ]------------------------------------------------
Main:
DO
PULSOUT 13, 850 ' Veer right
PULSOUT 12, 716
PAUSE 20
LOOP
To make the triangle, first calculate the number of pulses required for a one
meter or yard straight line, as in Question 4. Then fine-tune your distances to