Page 24
Français
Section2.Spécicationsdurobot
nettoyeur
Tension
d’alimentation du
boîtier de commande
100-240 Vca, 60 Hz
Tension
d’alimentation
30 Vcc
Puissance installée 150 W max
Longueur du câble 50 pi (15 m)
Dimensions du robot
nettoyeur (L x P x H)
16 x 16,5 x 10 po (41 x 42 x 25 cm)
Poids du robot
nettoyeur
20 lb (9 kg)
Filtration
Cartoucheltrantetoutusage
Durées de cycle 1,5 h au fond seulement; 2,5 h pour fond/
parois/surface de l’eau
Le robot nettoyeur est un produit à double isolation. Un appareil
électrique à double isolation n’exige pas d’être installé avec une
mise à la terre. La condition nécessaire à l’efcacité de la double
isolation est qu’aucune panne n’entraîne l’exposition d’une
tension dangereuse pouvant causer une décharge électrique.
Cette condition est satisfaite sans avoir à utiliser un cuvelage
de métal mis à la terre. Elle est réalisée par deux (2) couches
de matériau isolant autour des composants sous tension ou par
une isolation renforcée. Par conséquent, les appareils à double
isolation, comme ce robot nettoyeur, n’utilisent pas de che mise
à la terre (à trois broches).
Section 3. Assemblage et
conguration
3.1 Désemballage
Les articles suivants devraient se trouver dans la boîte :
• Robot nettoyeur et câble d’alimentation flottant
• Module de commande avec câble d’alimentation
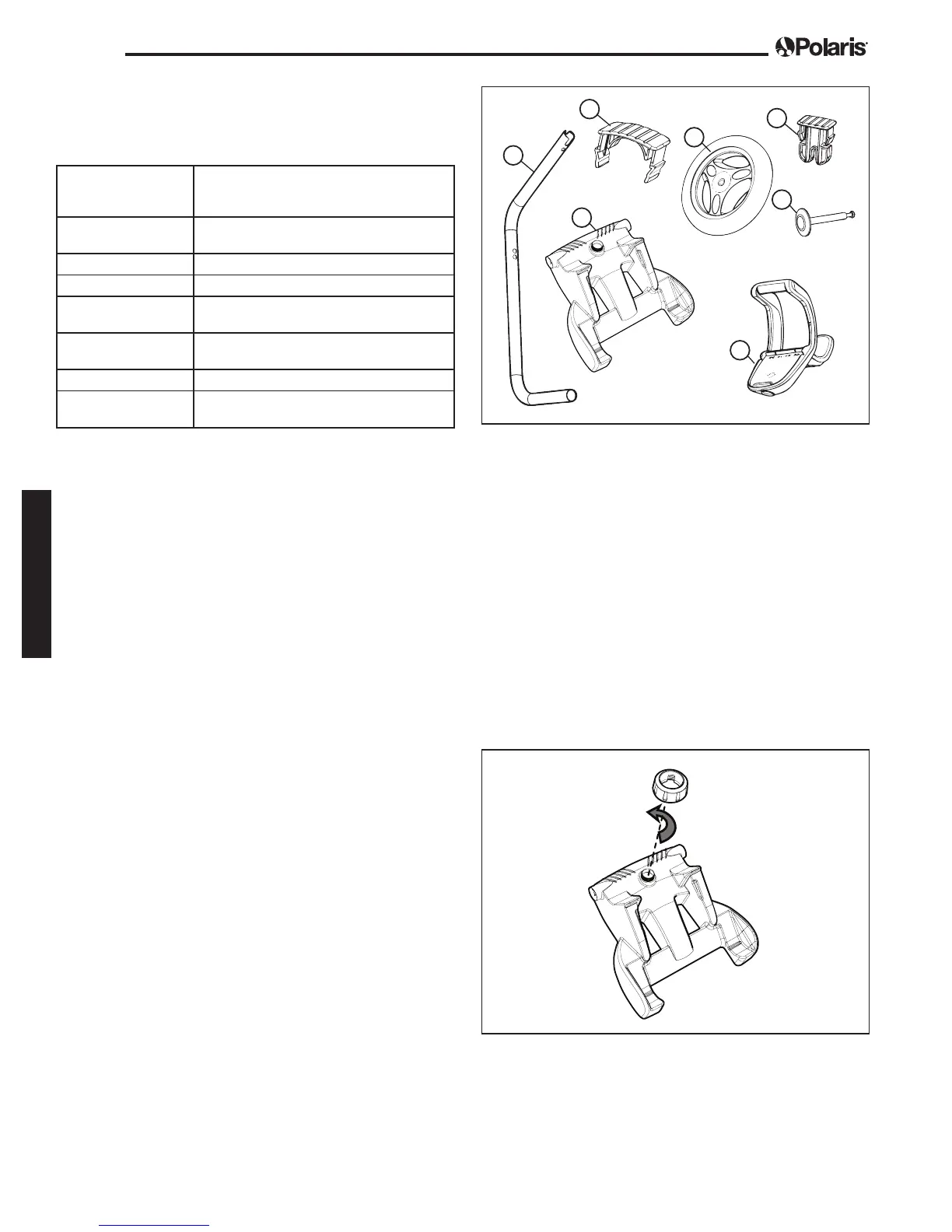
• Pièces d’assemblage du chariot de transport et de rangement
(Illustration 1)
(a) cadre de manutention
(b) blocs de soutien (x 2)
(c) roues (x 2)
(d) attaches de blocage des roues (x 2)
(e) essieu/enjoliveur (x 2)
(f) module de base
(g) poignée du robot nettoyeur
A
X 2
B
C
D
X 2
X 2
E
X 2
F
G
Illustration 1. Pièces d’assemblage du chariot
de transport
En déballant le robot nettoyeur et ses pièces :
• S’assurer que chaque pièce est présente dans la boîte.
• S’assurer que le robot nettoyeur et les pièces ne sont pas
endommagés.
• Si des pièces sont manquantes ou endommagées,
communiquer avec le soutien technique Polaris :
É.-U. 1-800-822-7933
Canada 1-888-647-4004
3.2 Assemblage du chariot de transport
1. Dévisser l’écrou à main du module de base
(Illustration 2).
Illustration 2. Retirer l’écrou à main du module
de base
2. Insérer la tige de métal du cadre de manutention
dans le module de base en positionnant l’extrémité
avec encoche vers le haut, puis tourner pour que les
coudes ne soient pas orientés dans votre direction.
(Illustration 3).

 Loading...
Loading...







