CHAPTER 3 SOFTWARE CONFIGURATION
Application Note U17209EJ1V0AN
48
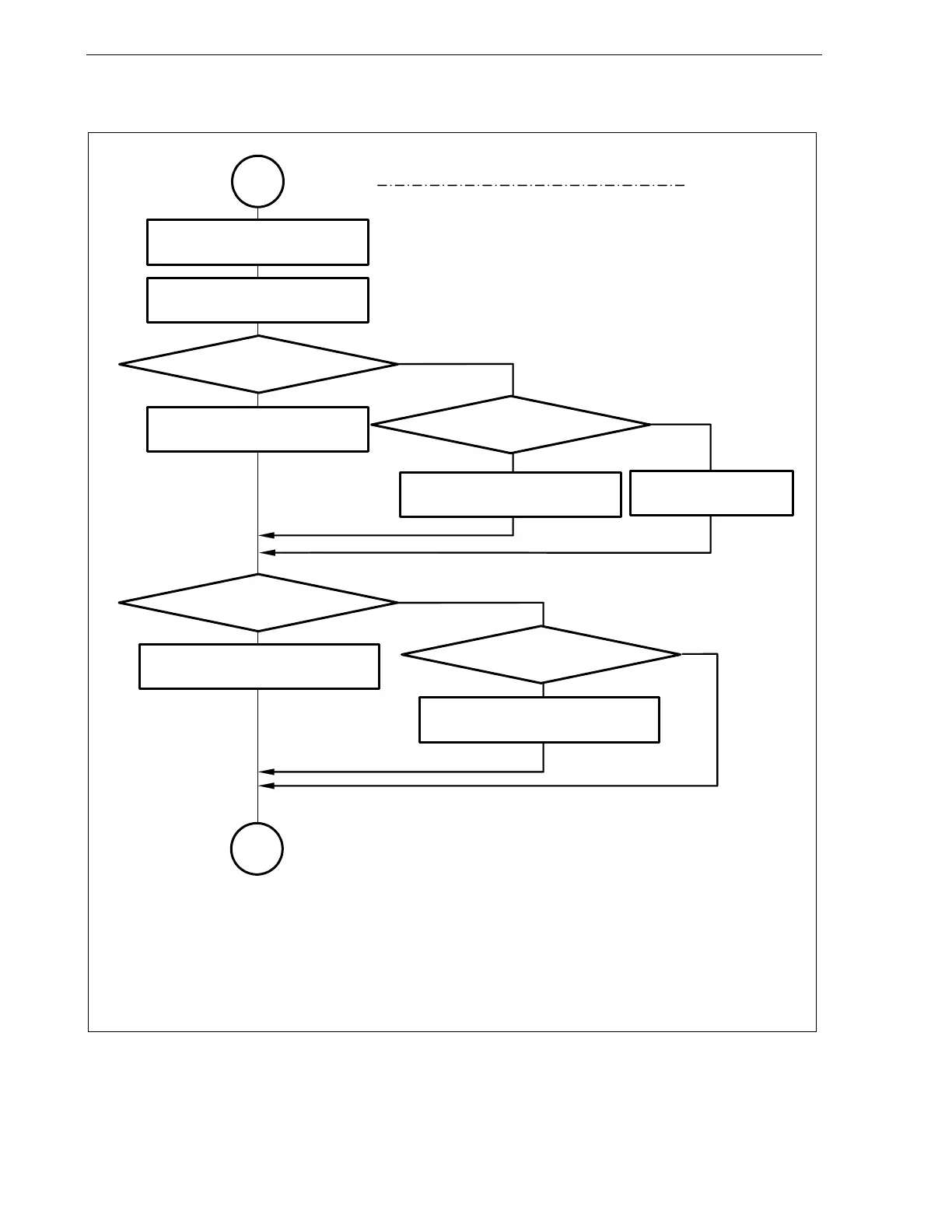
Figure 3-13. Control Interrupt Processing (4/5)
3
No
Yes
Speed difference =
Target speed – Present speed
Calculate PWM output value
Speed integral value = MAX. value
Speed integral value
calculation
4
PWM value < 0?
PWM value as 1
PWM value > MAX.?
PWM value as MAX.
Normal revolution processing
No
No
No
Yes
Yes
Yes
Speed integral value > MAX. value?
Speed integral value < −MAX. value?
Speed integral value = −MAX. value
Remarks 1. PWM = (Present speed × ksp) + (Speed difference × ksp/10) + Speed integral value + Speed
offset value
2. Speed integral value = Speed integral value + (Speed difference × ksi)
3. ksp: Speed proportion gain
ksi: Speed integral gain
 Loading...
Loading...