CHAPTER 3 SOFTWARE CONFIGURATION
Application Note U17209EJ1V0AN
62
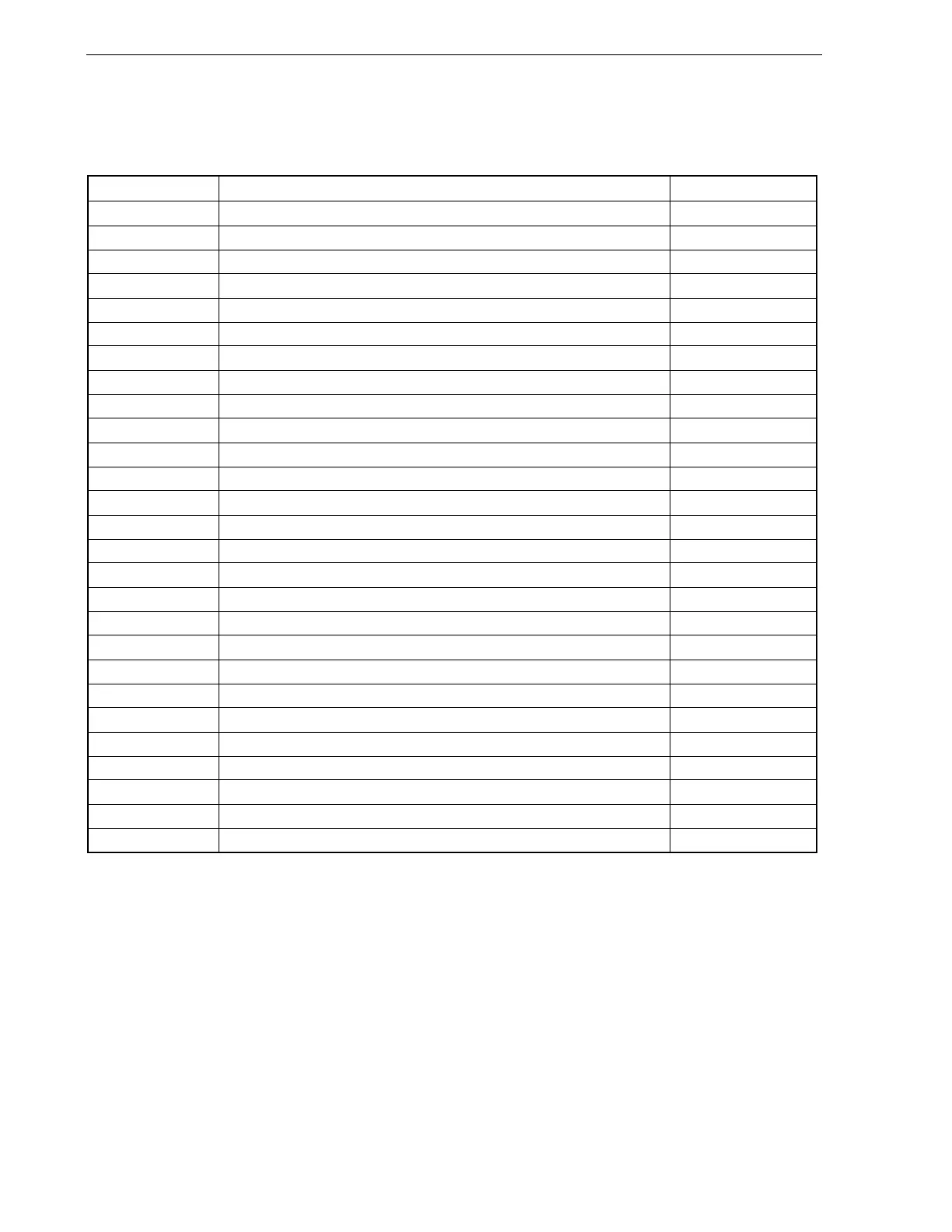
3.7 Constant Definitions
The following table shows the major constants used by the reference system.
Symbol Usage Value
PAI
π
3.141592
TH_U Radian value, jack-up constant 1000
RAD Radian value of one revolution 2 × PAI × TH_U
OFFSET Original point OFFSET 1945
RPM_RADS rpm → radian conversion constant 2 × PAI × TH_U/60
KSP Speed proportion constant 917
KSI Speed integral constant 0
P Number of motor poles 2
KSPGETA Speed proportion constant jack-up constant 10
KSIGETA Speed integral constant jack-up constant 14
SGETA sin jack-up constant 14
PWM_TS PWM cycle 50
µ
s
PWM_DATA PWM set value PWM_TS/0.05
SPEED_MAX Maximum speed 500 (3000 rpm)
SPEED_MINI Minimum speed 100 (600 rpm)
SPEED_INIT Initial revolution speed 700 rpm
SA_SPEED_MAX Maximum speed difference 800
IQMAX Maximum speed integral value 200000
MAX_I Maximum current value 800
TS Motor control period 800
µ
s
ACCEL_TIME Acceleration/deceleration time constant, 10 ms 1
ACCEL_DATA Number of acceleration/deceleration incremental revolutions 40 rpm
WATCH_START Speed monitor start time, 10 ms 500
ACCEL_VAL_1ST Initial acceleration/deceleration time constant 50
ACCEL_VAL Acceleration/deceleration time constant 3
ACCEL_SPD Acceleration/deceleration constant 50
PWM_INIT PWM initial value PWM_DATA/4
 Loading...
Loading...