206 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Chapter 10 Use the High-Speed Counter and Programmable Limit Switch
HSC Mode 5 – Two Input Counter (up and down) with External Reset and Hold
Blank cells = don’t care, = rising edge, = falling edge
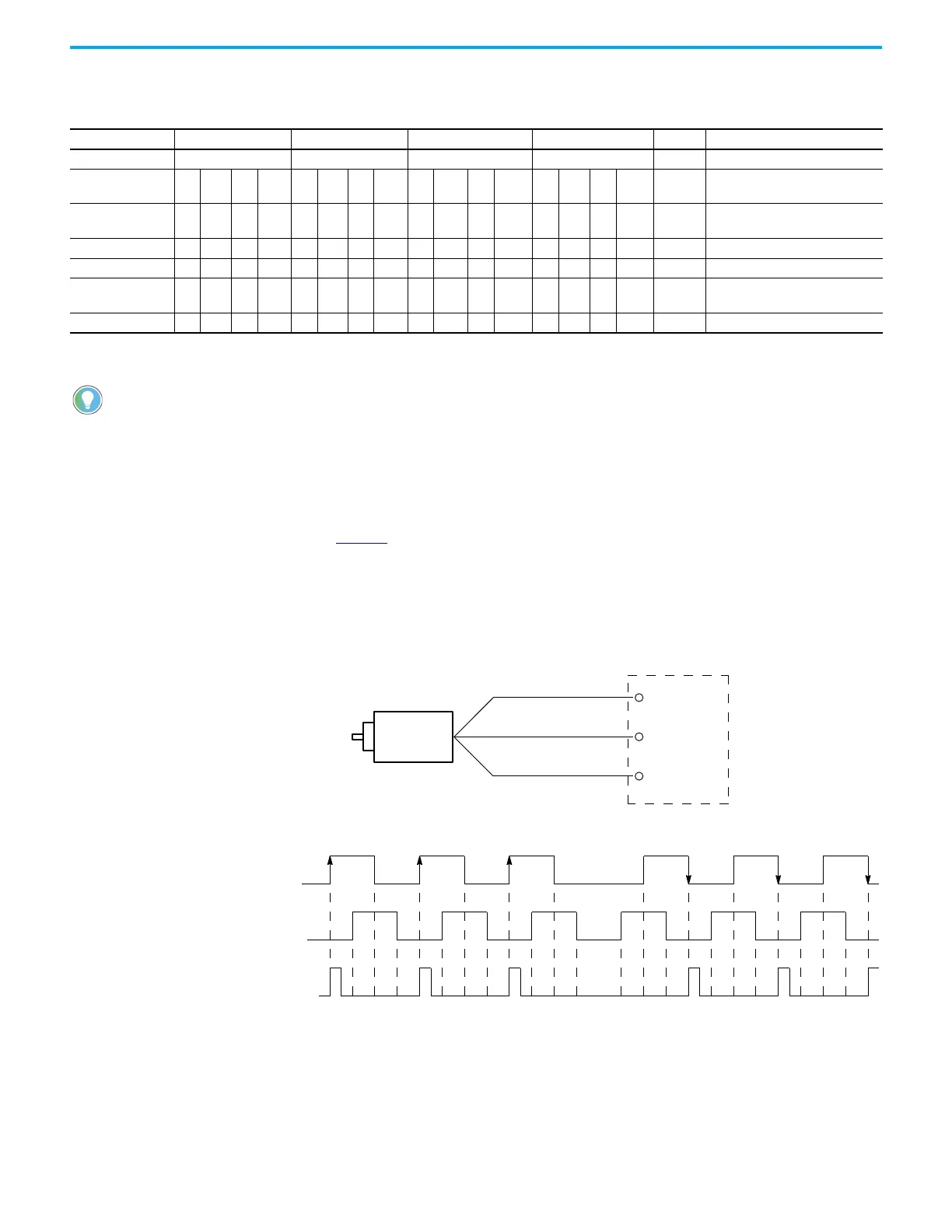
Using the Quadrature Encoder
The Quadrature Encoder is used for determining direction of rotation and position for rotating,
such as a lathe. The Bidirectional Counter counts the rotation of the Quadrature Encoder.
Figure 19
shows a quadrature encoder connected to inputs 0, 1, and 2. The count direction is
determined by the phase angle between A and B. If A leads B, the counter increments. If B
leads A, the counter decrements.
The counter can be reset using the Z input. The Z outputs from the encoders typically provide
one pulse per revolution.
Figure 19 - Quadrature Encoder Connected to Inputs
Table 48 - HSC Mode 5 Examples
Input Terminals Embedded Input 0 Embedded Input 1 Embedded Input 2 Embedded Input 3 CE Bit Comments
Function Count Direction Reset Hold
Example 1
on
(1)
off
(0)
on (1) off (0) off (0) on (1) HSC Accumulator + 1 count
Example 2 on (1)
off
(0)
on (1) off (0) off (0) on (1) HSC Accumulator - 1 count
Example3 on (1) off (0) on (1) Hold accumulator value
Example 4 on (1) off (0) off (0) Hold accumulator value
Example 5 on (1)
off
(0)
on (1) off (0) Hold accumulator value
Example 6 Clear accumulator (=0)
Inputs 0…11 are available for use as inputs to other functions regardless of the HSC being used.
Reverse Rotation
Forward Rotation
B
A
1
2
3
2
1
Count
Input 0
Input 1
Input 2
A
B
Z
Reset
 Loading...
Loading...