370 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Appendix H User-defined Function Block Motion Instructions
The raC_Opr_K5100_MAM instruction moves an axis to using a target position specified and
uses the Move Type to perform the move (index).
Error Codes:
• 100 - Kinetix 5100 drive is not ready
• 101 - Kinetix 5100 drive is faulted
• 103 - MSF is executing
• 105 - Drive is disabled
• 107 - raC_Opr_K5100_MAS is executing
• 108 - Other motion UDFB is sending the command
• 111 - SpeedReference is out of range
• 112 - AccelReference is out of range
• 113 - DecelReference is out of range
• 119 - Move Type is out of range
• 126 - Homing not completed
• 129 - Motor is not connected to drive
• 140 - Operation is not supported when device is virtual
• 141 - Motor type not supported (Linear)
• 150 - PositionReference in counts exceeds maximum allowed value (2147481984)
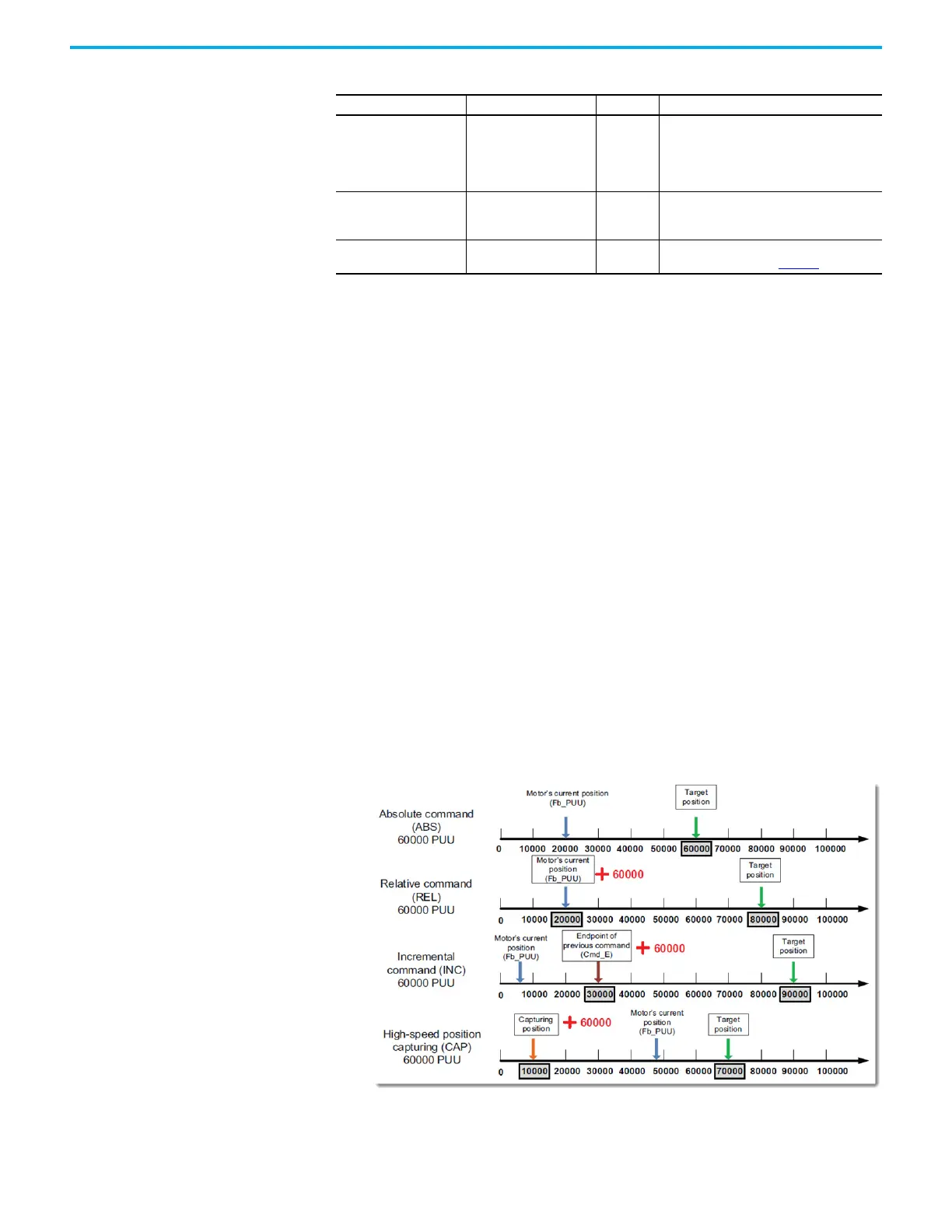
Set_MoveType:
• Four types of move operations (Set_MoveType = 0,1,7,8) are performed as shown.
Sts_IP (In Progress) BOOL Tag
This bit is set when the rung makes a false-
to-true transition, the Stop message
transaction is successful, and the motor
begins to decelerate. This bit will remain set
as the motor is executing the stop.
Sts_PC (Process
Completed)
BOOL Tag
This bit is set when the rung makes a false-
to-true transition, the Sts_IP is set, and the
motor reaches the Target Position.
Sts_ERR DINT Tag
Instruction error codes. See Kinetix 5100
Drive UDFB Error Codes (Table 119
) for details.
Table 112 - MAM Operands (Continued)
Operand Type Format Description
 Loading...
Loading...