Rockwell Automation Publication 750-UM002H-EN-P - February 2017 13
Safety Concept Chapter 1
Safe State
The safe state encompasses all operation that occurs outside of the other
monitoring and stopping behavior defined as part of the Safe Torque Off
option module.
If a Safe State fault is detected, the safety option module transitions to the safe
state. This includes faults related to the integrity of hardware or firmware. The
drive safe state is defined as preventing force-producing power from being
provided to the motor. For more information on the safe state, see
IEC 61800-5-2.
Safety Reaction Time
The safety reaction time is the length of time from a safety-related event as
input to the system until the system is in the safe state.
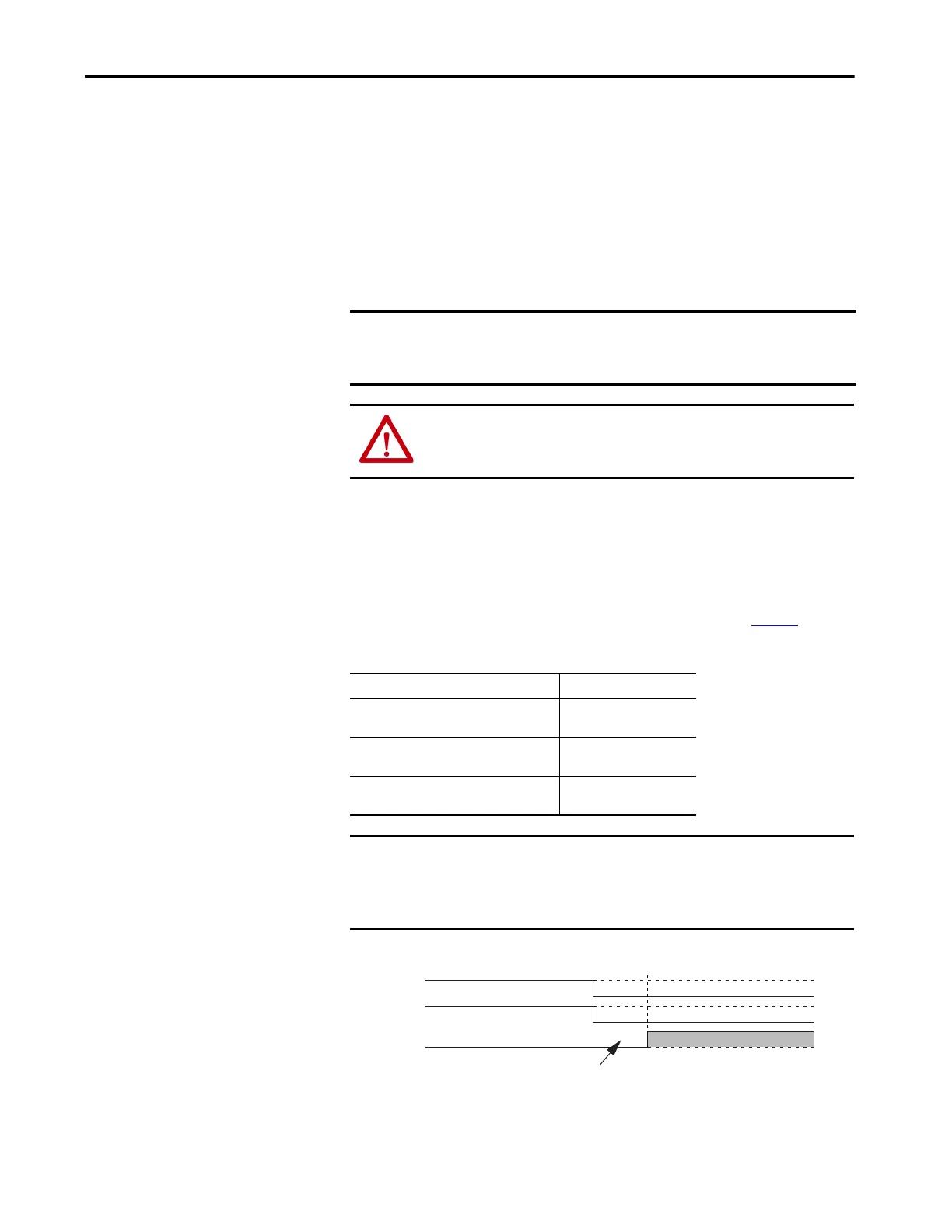
The safety reaction time from an input signal condition that triggers a safe
stop, to the initiation of the configured Stop Type, is shown in Table 3
.
Table 3 - Safety Reaction Time
Figure 1 - Safety Reaction Timing Diagram
IMPORTANT The drive is in the safe state if the safety function is installed and the drive
status is ‘Not Enabled’. Drive ‘Ready’ is NOT a safe state even if there is no
motion.
ATTENTION: In circumstances where external influences (for example,
falling of suspended loads) are present, additional measures (for example,
mechanical brakes) can be necessary to prevent a hazard.
Drive Family Value, max
PowerFlex 753 drives
Frames 1…7
10 ms
PowerFlex 755 drives
Frames 1…10
10 ms
PowerFlex 755T drive products
Frames 8…12
10 ms
IMPORTANT An input signal condition that is present for less than the reaction time can
not result in the safety function being performed. Repeated requests of the
safety function for less than the reaction time can result in a spurious
detection of a fault.
SE
SP
Safe Torque O
Safety Reaction Time

 Loading...
Loading...











