R86 User Manual
6. Common faults and troubleshooting
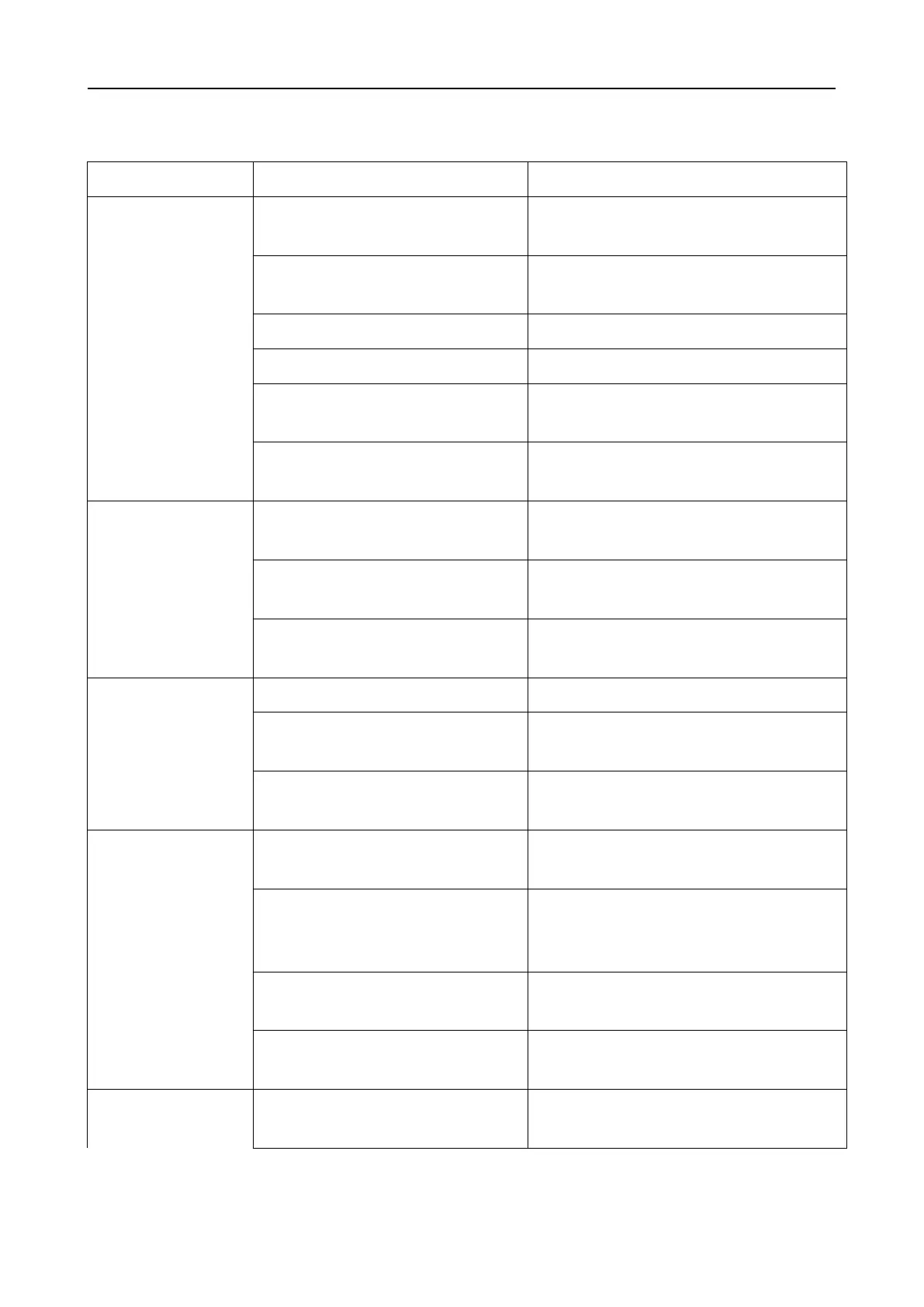
Check the power supply circuit for
normal power supply
The motor rotor is locked but
the motor does not work
Pulse signal is weak; increase the
signal current to 7-16mA
Select the right micro-stepping
Solve the alarm and re-power
Pull up or disconnect the enable
signal
Command pulse is incorrect
Check whether the upper computer
has pulse output
The steering of
motor is wrong
The rotary direction of motor is
reverse
The motor cable is
disconnected
The motor has only one
direction
Pulse mode error or DIR port
damaged
The motor connection is wrong
Check the motor connection
The motor connection and
encoder connection are wrong
Check the sequence of encoder
connection
The voltage is too high or too
low
The position or
speed is wrong
Eliminate interference for reliable
grounding
The command input is incorrect
Check the upper computer
instructions to ensure the output is
correct
The setting of Pulse per
revolution is wrong
Check the DIP switch status and
correctly connect the switches
Encoder signal is abnormal
Replace the motor and contact the
manufacturer
The driver
terminal burned
Short circuit between terminals
Check power polarity or external
short circuit

 Loading...
Loading...
