R86 User Manual
3.3Motor connection
The matching motor of the R86 driver is the low resistance and low inductance hybrid
stepper motor.
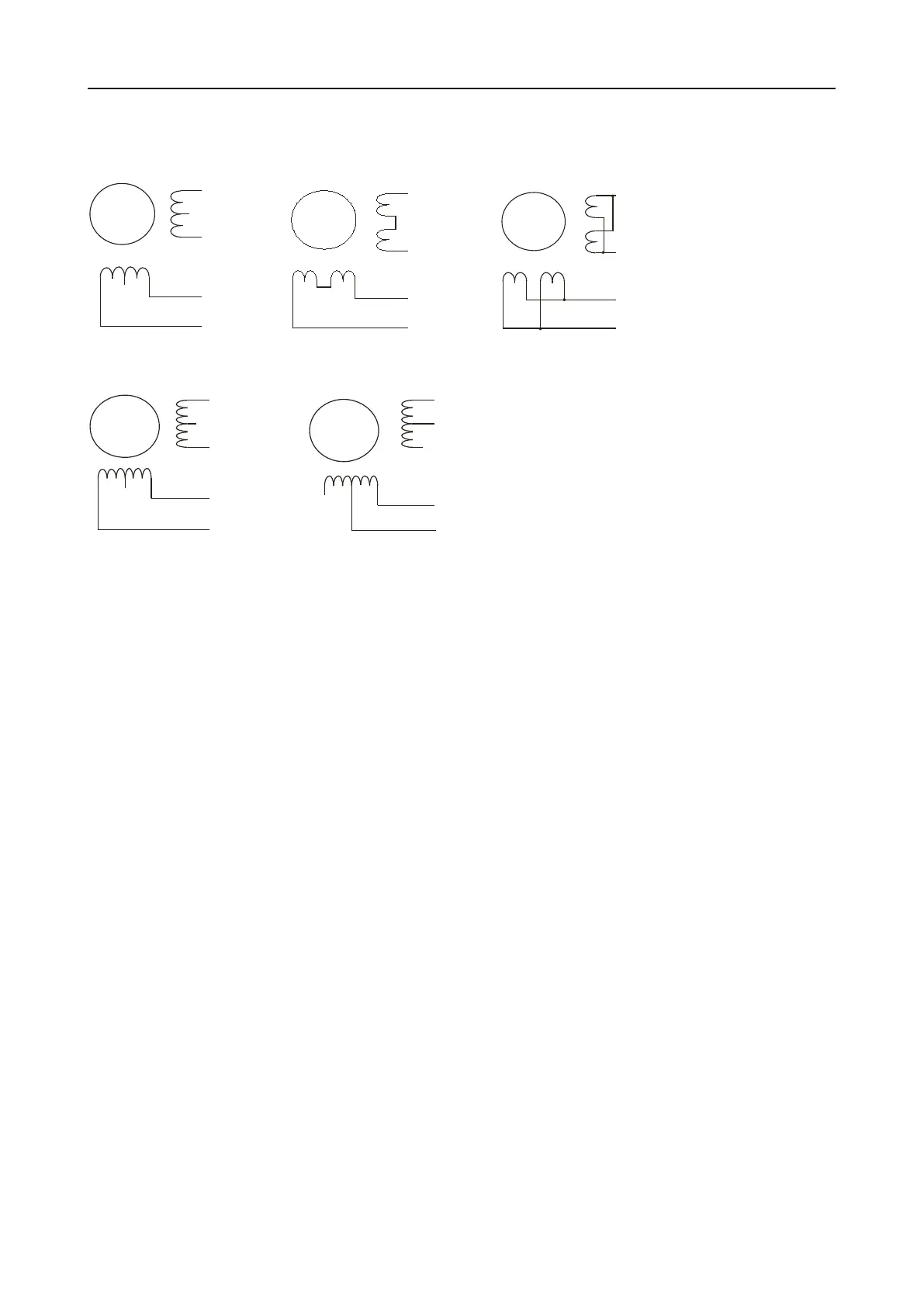
The common 2-phase stepper motor’s lead number are 4, 8 and 6.
There is only one connection mode for 4 leads motor.
Series and parallel connection mode are used by 8 leads motor:
When series used, the winding inductance increased. The set of Driver current should be
about 0.7times than before. This is suitable for low speed required.
When parallel used, the winding inductance decreased. The set of Driver current should be
about 1.4times than before. This is suitable for high speed required.
Parallel and central tapping connection mode are used by 6 leads motor:
When parallel used, all the winding connected, and the inductance was higher. This is
suitable for low speed required.
When central tapping used, half of the winding connected, and the inductance was lower.
This is suitable for high speed required.
3.4 Control signal connection
3.4.1 PUL, DIR Port: connection for pulse command
The signal interface of standard R series driver is in the form of pulse, and the R86 can
receive two kinds of pulse command signals.

 Loading...
Loading...
