Assembly
50 03.00 | FT | Assembly and Operating Manual | en | 389582
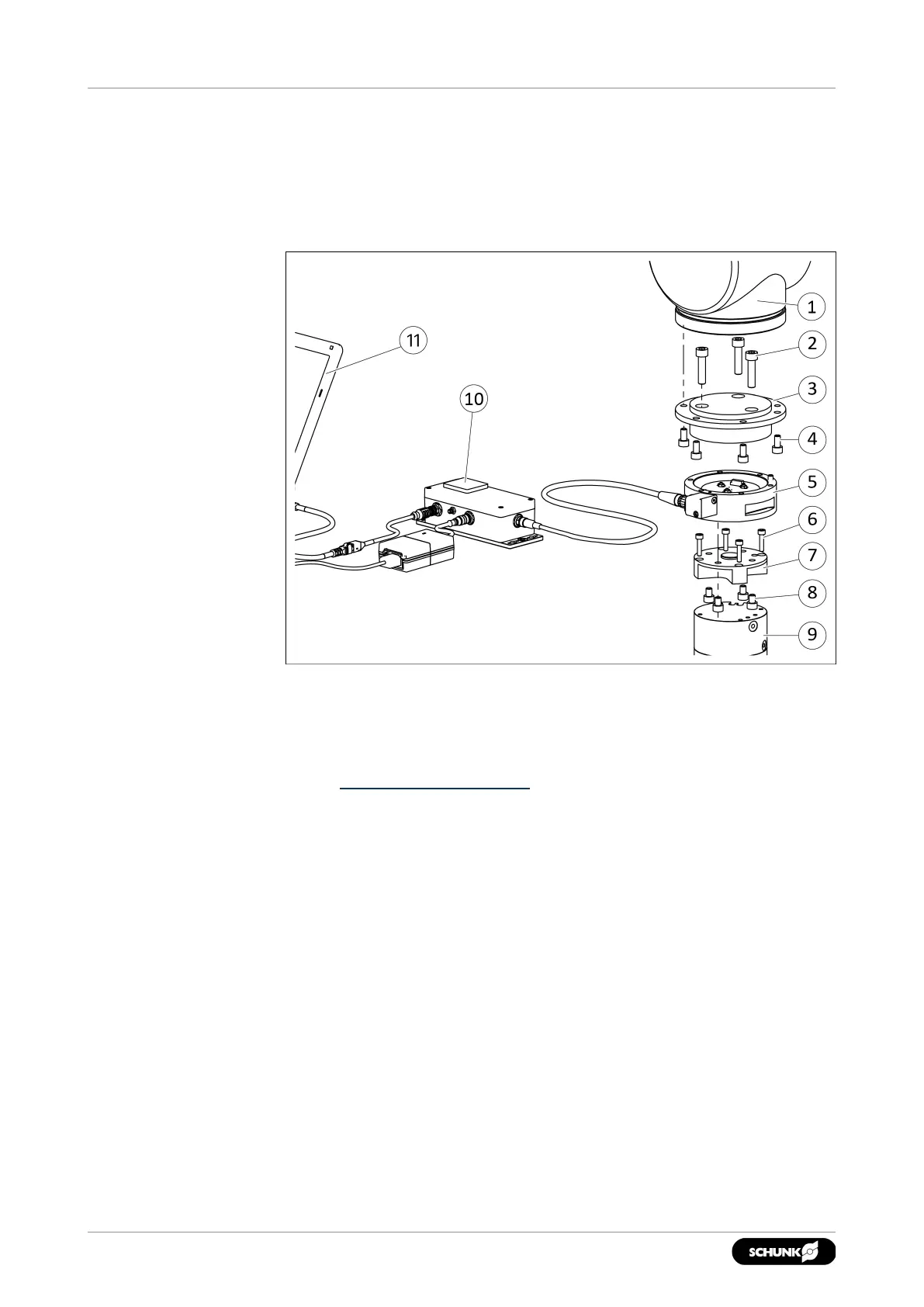
Assembly with adapter plate provided by the customer
■ The corresponding interface(10) has been put into operation.
■ Use the demo program(11) to observe gage saturation errors
during assembly. If an error occurs, stop assembly until the
error disappears
Assembly with adapter plate provided by the customer
1. The adapter plate for assembling on the robot is provided by
the customer.
✓ Observe requirements for adapter plate,
Mechanical connection [}47].
2. Apply Loctite 222 threadlocker to the mounting screws(2) and
(4).
3. Fasten the adapter plate(3) to the robot(1) with mounting
screws(4).
4. Fasten the force-torque-sensor(5) to the adapter plate(3)
with mounting screws(2). IMPORTANT!Risk of damage to the
internal electronics! The mounting screws(2) must not be too
long.
5. Apply Loctite 222 threadlocker to the mounting screws(6) and
(8).
6. Fasten the adapter plate(7) to the end effector(9) with
mounting screws(6).
7. Fasten the end effector(9) to the force-torque-sensor(5) with
mounting screws(8).