Assembly
Mini/Nano/ IP
protection class
The Nano, Mini, IP-protected and some Omega force-torque-
sensors do not have a removable interface plate and are mounted
directly on the robot using an adapter plate.
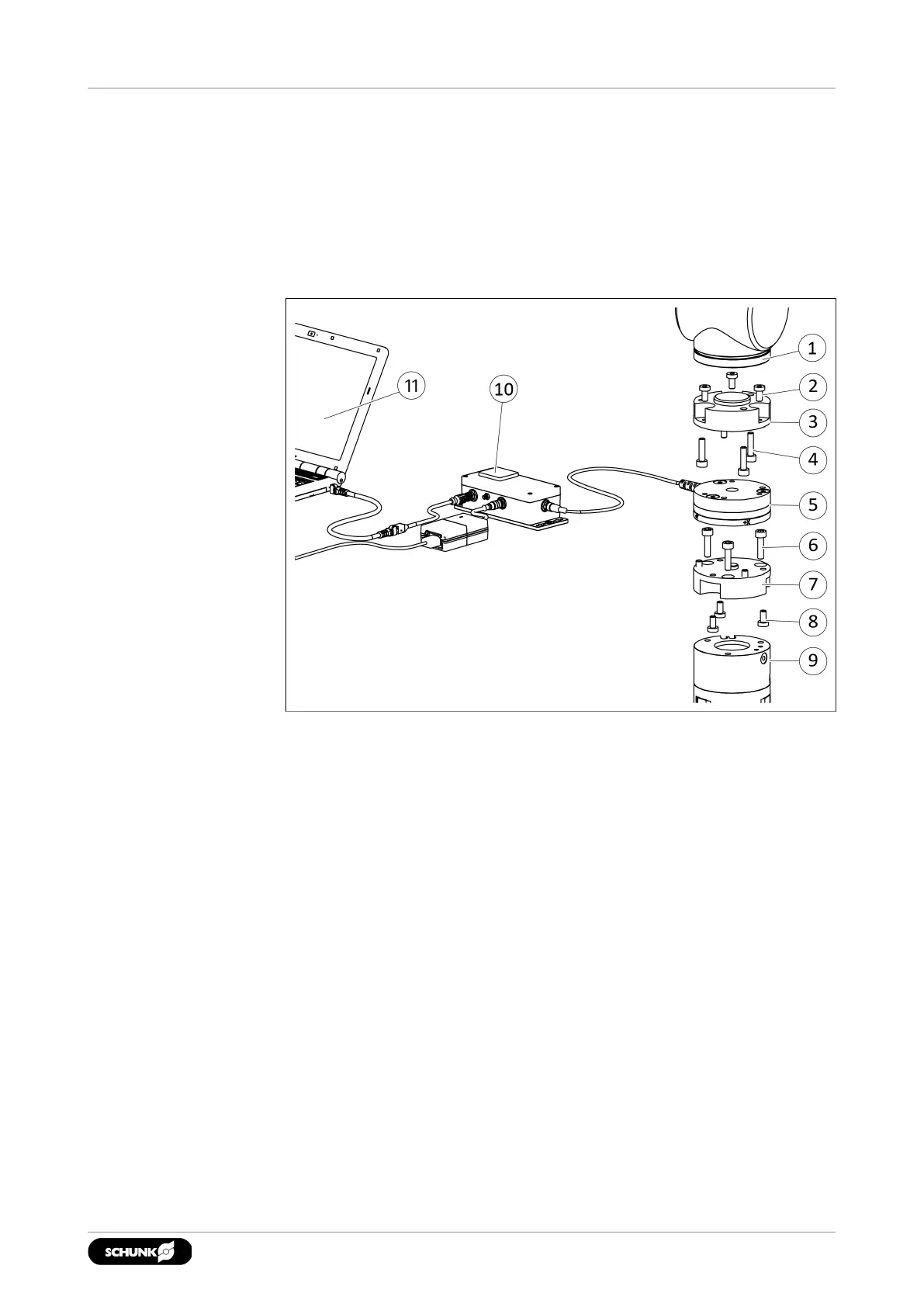
■ The corresponding interface(10) has been put into operation.
■ Use the demo program(11) to observe gage saturation errors
during assembly. If an error occurs, stop assembly until the
error disappears
1. Apply Loctite 222 threadlocker to the mounting screws(2) and
(4).
2. Mount the adapter plate(3) on the robot(1) with mounting
screws(4).
3. Mount the force-torque-sensor(5) on the adapter plate(3)
with mounting screws(2).
4. Apply Loctite 222 threadlocker to the mounting screws(6) and
(8).
5. Mount the adapter plate(7) on the force-torque-sensor(5)
with mounting screws(8).
6. Mount the end effector(9) on the adapter plate(7) with
mounting screws(6).
5103.00 | FT | Assembly and Operating Manual | en | 389582