LR1121
User Manual Rev 1.1
UM.LR1121.W.APP Mar 2023
25 of 130
Semtech
Proprietary & Confidential
www.semtech.com
3. Host-Controller Interface
The LR1121 exposes an API which allows the Host controller to communicate with the LR1121 through a set of SPI
commands / responses. The BUSY signal is used as a handshake to indicate if the LR1121 is ready to accept a command.
Therefore, it is necessary to check the status of BUSY prior to sending a command.
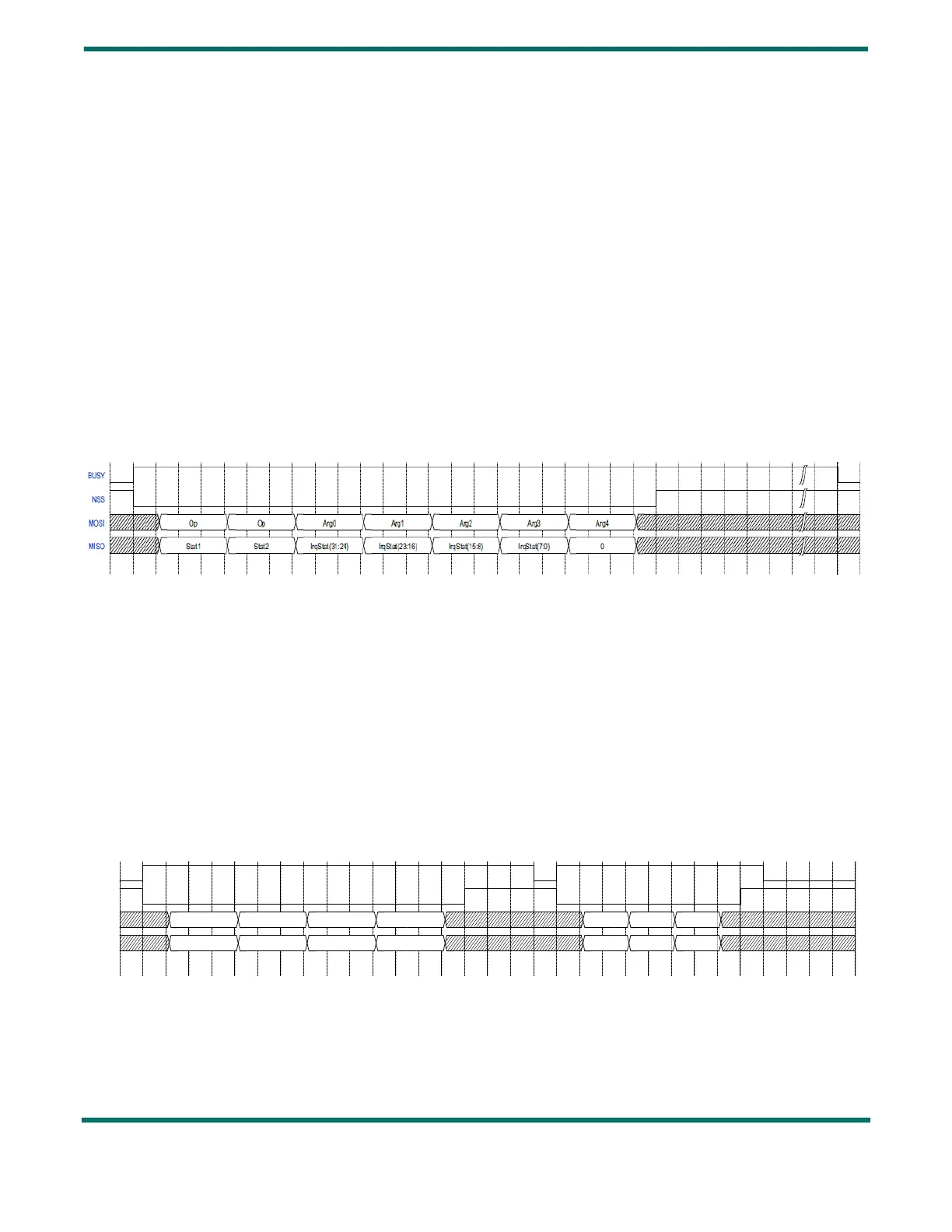
3.1 Write Commands
During write commands, the LR1121 returns the status registers and the interrupt registers to the host on the MOSI pin,
depending on the length of the command opcode and arguments.
The host sends a 16-bit opcode followed by the required arguments.
The BUSY signal is automatically asserted on the falling edge of the NSS.
Once the LR1121 finishes processing the command, the BUSY signal is de-asserted to indicate that the device is ready to
accept another command.
Figure 3-1: Write Command Timing Diagram
3.2 Read Commands
Specific Read commands retrieve data from LR1121, such as internal status results.
The host sends a 16-bit opcode, followed by arguments if required.
The BUSY signal is automatically asserted on the falling edge of the NSS.
Once the LR1121 has finished preparing the requested data, the BUSY signal is de-asserted.
The host can then read back the data by sending NOPs (0x00 bytes) to shift out the data on the SPI.
Figure 3-2: Read Command Timing Diagram
BUSY
NSS
MOSI Op Op Arg0 Arg1 NOP NOP NOP
MISO
Stat1 Stat2 IrqStat(31:24) IrqStat(23:16) Stat1 Rsp0 Rsp1