5 Integration and commissioning of the NAV-LOC in a vehicle
8023450/2018-12-17| SICK OPERATING INSTRUCTIONS | NAV-LOC
10
Subject to change without notice
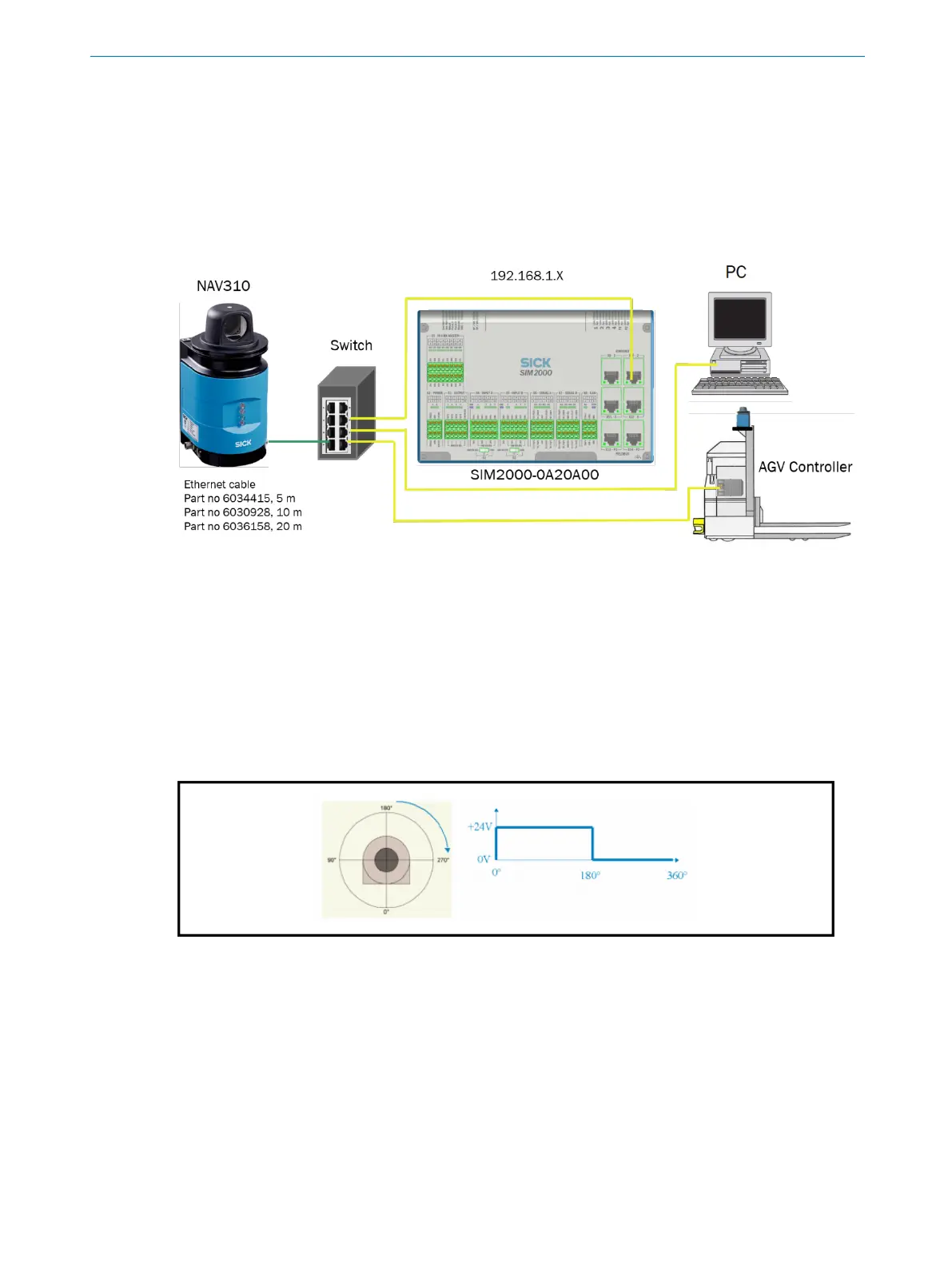
5.2 Connecting the components with connection to the network in
the AGV using a switch
The vehicle control must have at least one Ethernet interface in order to communicate with the NAV-
LOC.
When using a switch, all components must be set in the same IP number range or a DHCP server
must be available. In this configuration, access is possible from the PC and vehicle computer to the
SIM and the laser scanner.
Integrating the NAV-LOC into an AGV
5.3 Synchronization of the NAV310 2D LiDAR sensor with the
navigation control
The navigation control synchronizes with the timer of the connected NAV310 scanner for precise as-
signment of the current scan.
The synchronization described below is essential for trouble-free operation.
The NAV310 outputs a signal depending on the position of the scanner head.
This signal is used to synchronize the scans and balance out different run times via the Ethernet in-
terface.
 Loading...
Loading...




