4 Operating the Application
4.2 Operation via digital inputs
SINAMICS G120 DP at S7-1200
Entry-ID: 70155469, V1.4, 07/2018
Copyright Siemens AG 2018 All rights reserved
4.2 Operation via digital inputs
For security reasons, the SINAMICS drives in this application example are
exclusively moved via digital inputs, the HMI is only used for monitoring
.
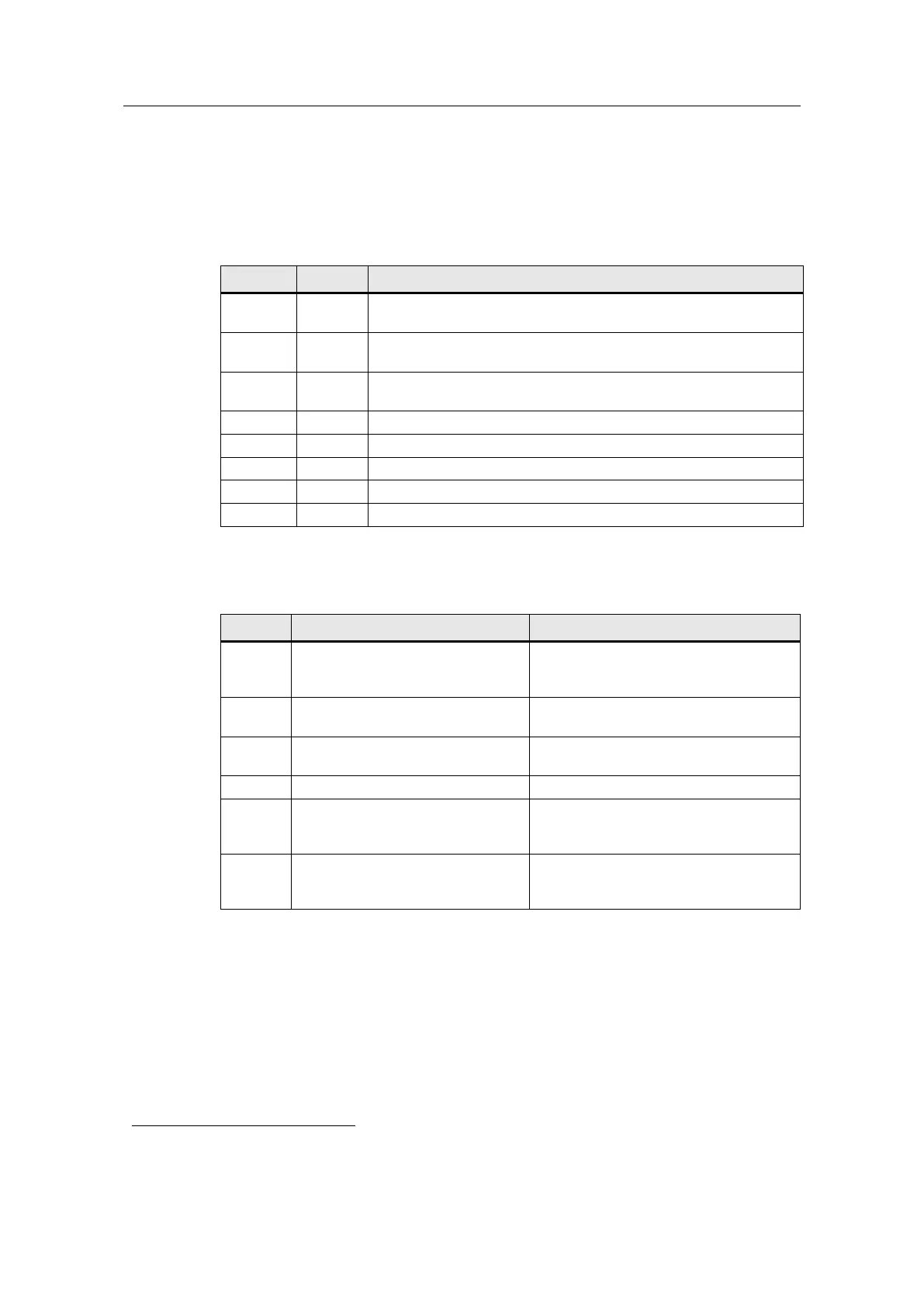
Table 4-1: Digital inputs
Switching the SINAMICS drive on/off,
(Off2 =1 and Off3 =1 must apply for the operation)
0 = Immediately switching off the motor. The SINAMICS drive
coasts.
0 = Fast stop. The motor is decelerated with ramp-down time Off3
(P1135) until it stops
A rising edge acknowledges a pending error in the SINAMICS drive
Reversed direction, the polarity of the setpoint value is negated.
The setpoint is set to 0.
The setpoint is increased
The setpoint is decreased
To switch on the SINAMICS drive, please perform the steps below:
Table 4-2: Instruction – Switch on the SINAMICS drive
Apply 24V to “Off2” (I 0.1) and
“OFF3” (I 0.2).
The further required control bits for the
operation are permanently set to 1 by
the program.
Enter a pulse (switching on and
back off) to “Ack” (I 0.3).
This acknowledges a possibly pending
error message.
Enter a pulse (switching on and
back off) to “0” (I 0.5).
The setpoint is set to 0.
Apply 24V to “On” (I 0.0).
The SINAMICS drive switches on.
Change the setpoint value with
inputs “n+” (I 0.6), “n-” (I 0.7) and
“0” (I 0.5).
The speed of the motor changes.
Remove the 24V from “On” (I 0.0).
The SINAMICS drive switches back off
and the motor is shut down with the
configured ramp-down time.
If you still wish to control the drive from the HMI control device, you need to leave the input
parameters “control_word” and “setpoint” of the Process_Data [FB11] when calling it in
network 2 of the Main [OB1].
 Loading...
Loading...







