2 Hardware Configuration for "Motion Control”
TOs of S7-1500(T)
Entry ID: 109743134, V1.0, 05/2017
Siemens AG 2017 All rights reserved
2 Hardware Configuration for "Motion
Control”
This chapter describes the basic hardware configuration of a motion control
application with SIMATIC. In doing so, the general functions of the individual
components are displayed.
2.1 Basic configuration
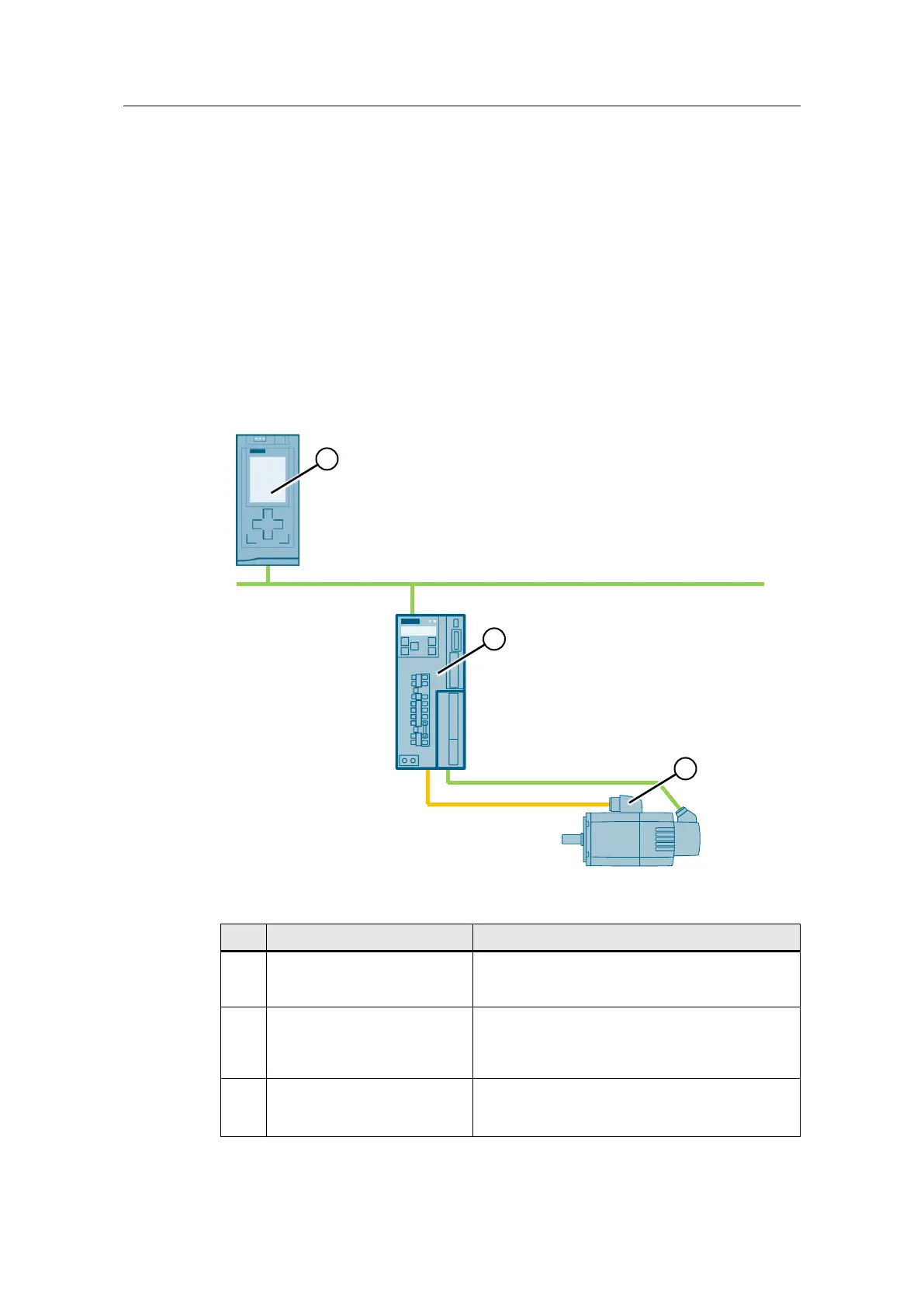
The basic hardware configuration of a motion control application is as follows:
Figure 2-1 Basic hardware configuration
Table 2-1 Basic hardware configuration
Controller and control of the drive system and
therefore of the motor of the motion control
application.
Controlling the motor. Providing the necessary
motor current to move the connected motor.
Position decoding of the motor axis (incremental
or absolute).
Executing the desired rotation.
The motor forms the interface to the mechanical
components of the motion control application.
 Loading...
Loading...







