EN
9
0478 131 8349 A - EN
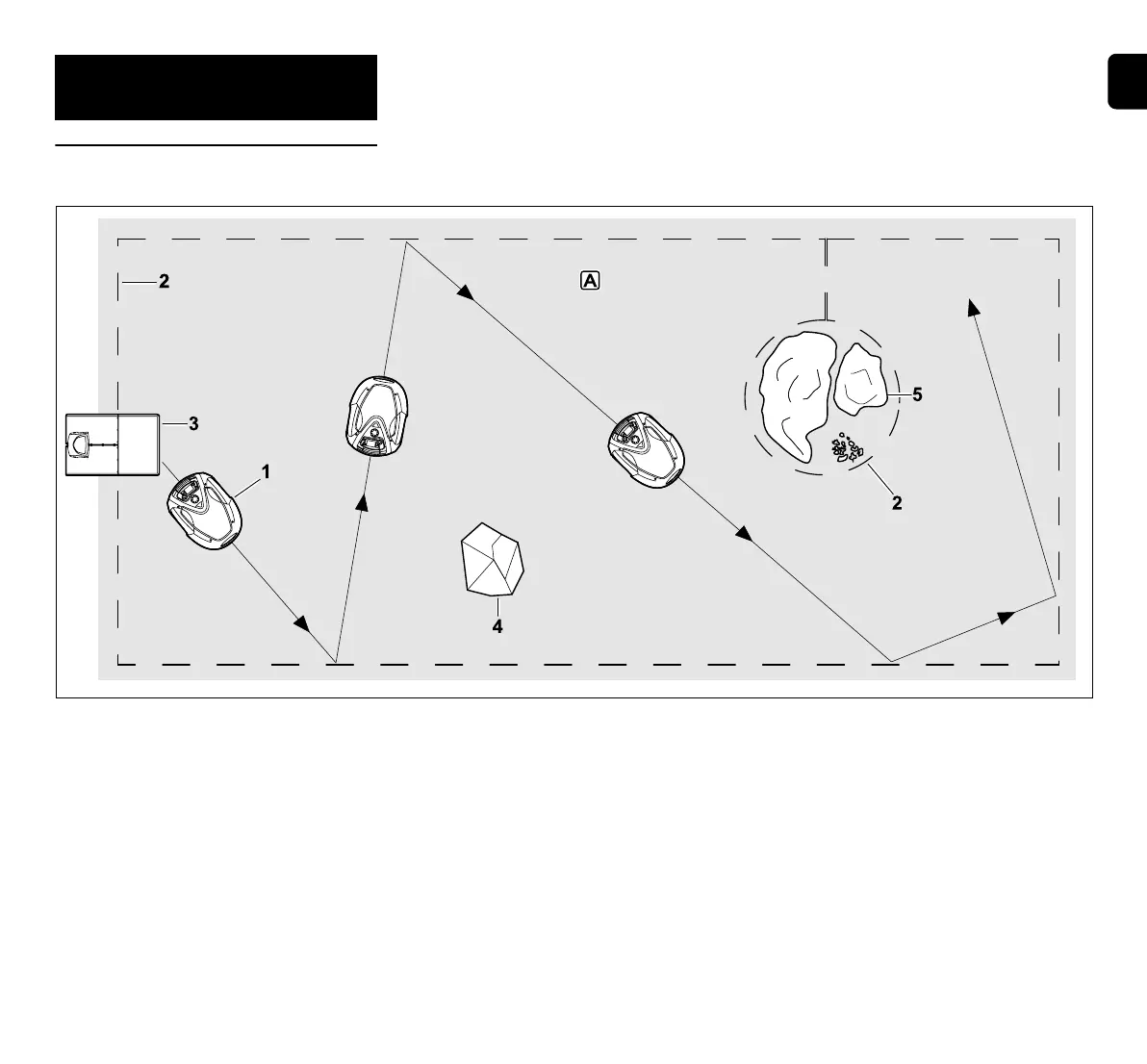
4.1 Operating principle
The robotic mower (1) is designed for the
automatic mowing of lawns. It mows the
lawn in randomly selected paths.
In order for the robotic mower to detect the
borders of the mowing area A, a
perimeter wire (2) must be routed around
that area. A wire signal generated by the
docking station (3) flows through this
perimeter wire.
Solid obstacles (4) in the mowing area are
reliably detected by the robotic mower by
means of an impact sensor. Areas (5) that
the robotic mower is not to enter and
obstacles that need to be avoided must be
separated from the remaining mowing
area using the perimeter wire.
When automatic mowing is switched on
the robotic mower independently leaves
the docking station and mows the lawn
during the active times (Ö 11.7). The
robotic mower automatically travels to the
docking station to recharge the battery.
The number and duration of the mowing
and charging operations within the active
times are adapted fully automatically. This
guarantees that the required weekly
mowing duration is always achieved.
When automatic mowing is switched
off and for mowing operations
independent of the active times, a
mowing operation can be activated using
the Mow button or with the command
"Start mowing" or "Start time-delayed
mowing". (Ö 11.5)
4. How the robotic mower
works

 Loading...
Loading...









