EN
32
Object 0x6049 : vl_velocity_decceleration
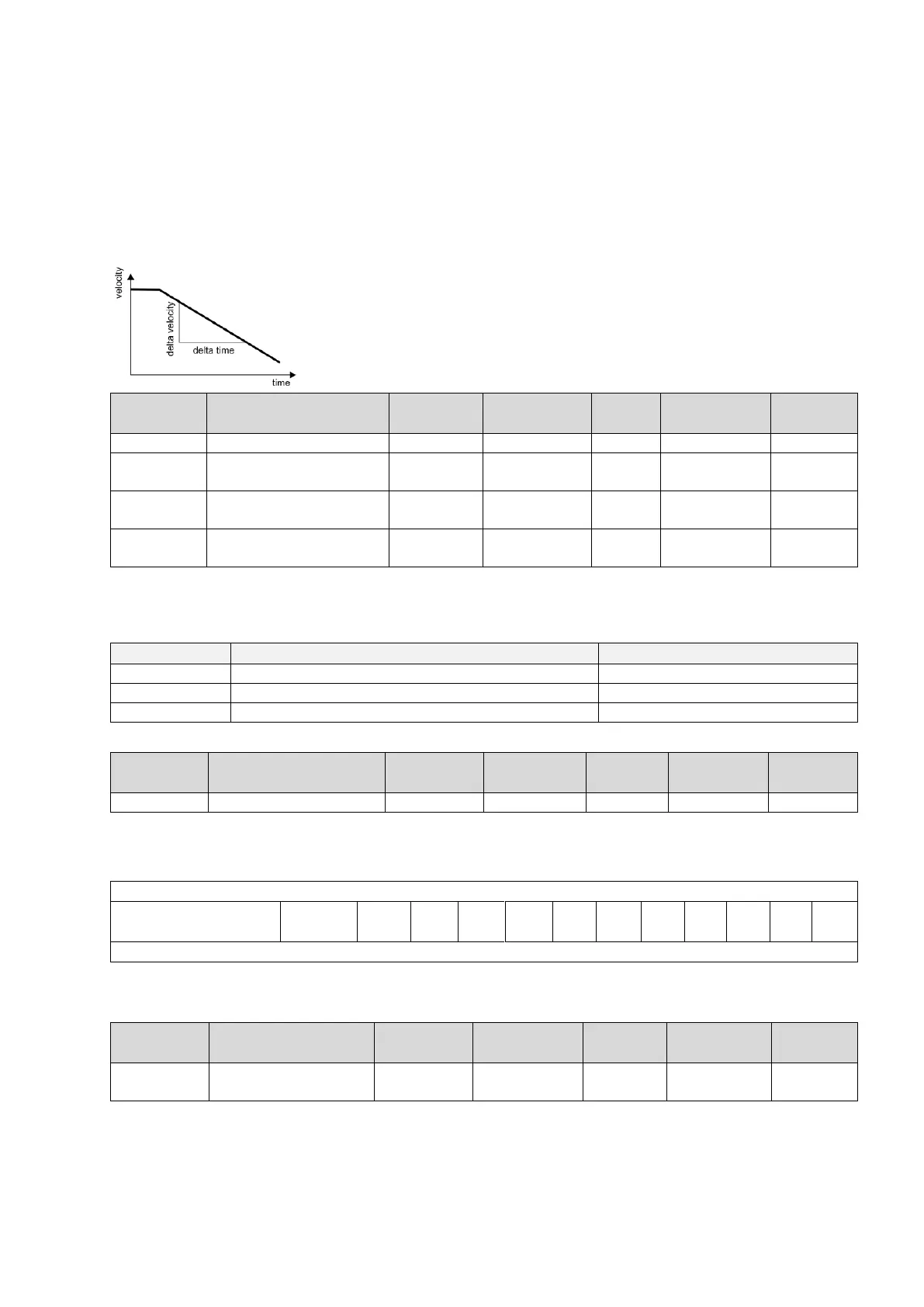
This object must indicate the configured delta velocity and the delta time of the slope of the deceleration
ramp.
Subindex 0 indicates the number of supported subindexes.
Subindex 1 indicates the delta velocity. The value of the delta velocity must be specified in revolutions per
minute (rpm).
Subindex 2 indicates the delta time. The value of the delta time is given in seconds.
The delta velocity and the delta time are shown here:
vl_velocity_deceleration
_number_of_entries
vl_velocity_deceleration
_Delta_speed
vl_velocity_deceleration
_Delta_time
Objekt 0x6402 : motor_type
This object must indicate the type of motor attached to and driven by the drive device.
The following table specifies the value definition:
Squirrel cage Induction motor
NOTE: See CiA402-2 Table 7
Object 0x6502 : supported_drive_modes
This object contains information about the supported drive modes.
Legend: cstca = cyclic synchronous torque mode with communication angle; cst = cyclic synchronous torque mode; csv = cyclic
synchronous velocity mode; csp = cyclic synchronous position mode; ip = interpolated position mode; hm = homing mode; r = reserved;
tq = torque-controlled mode; pv = profile velocity mode; vl = velocity-controlled mode; pp = profile position mode.