page
15
January 2020 - Rev. 1.2
Order Cod. 1902503003
Forexample,ifonewantstoobtainaspeedof50000
microstep/s
2
,onemustcalculatethefollowing:
Theparameterswithonejerkdimensions(rstderivative
of acceleration)must be intended as unsigned 32-bit
integers;theseintegers(actuallyxedpointnumbers
informat0:32)areobtainedbymultiplyingby2
32
)the
numberofmicrosteps/cycle
3
.
For example, if one wants to obtain a jerk of 500
microstep/s
3
,onemustcalculatethefollowing:
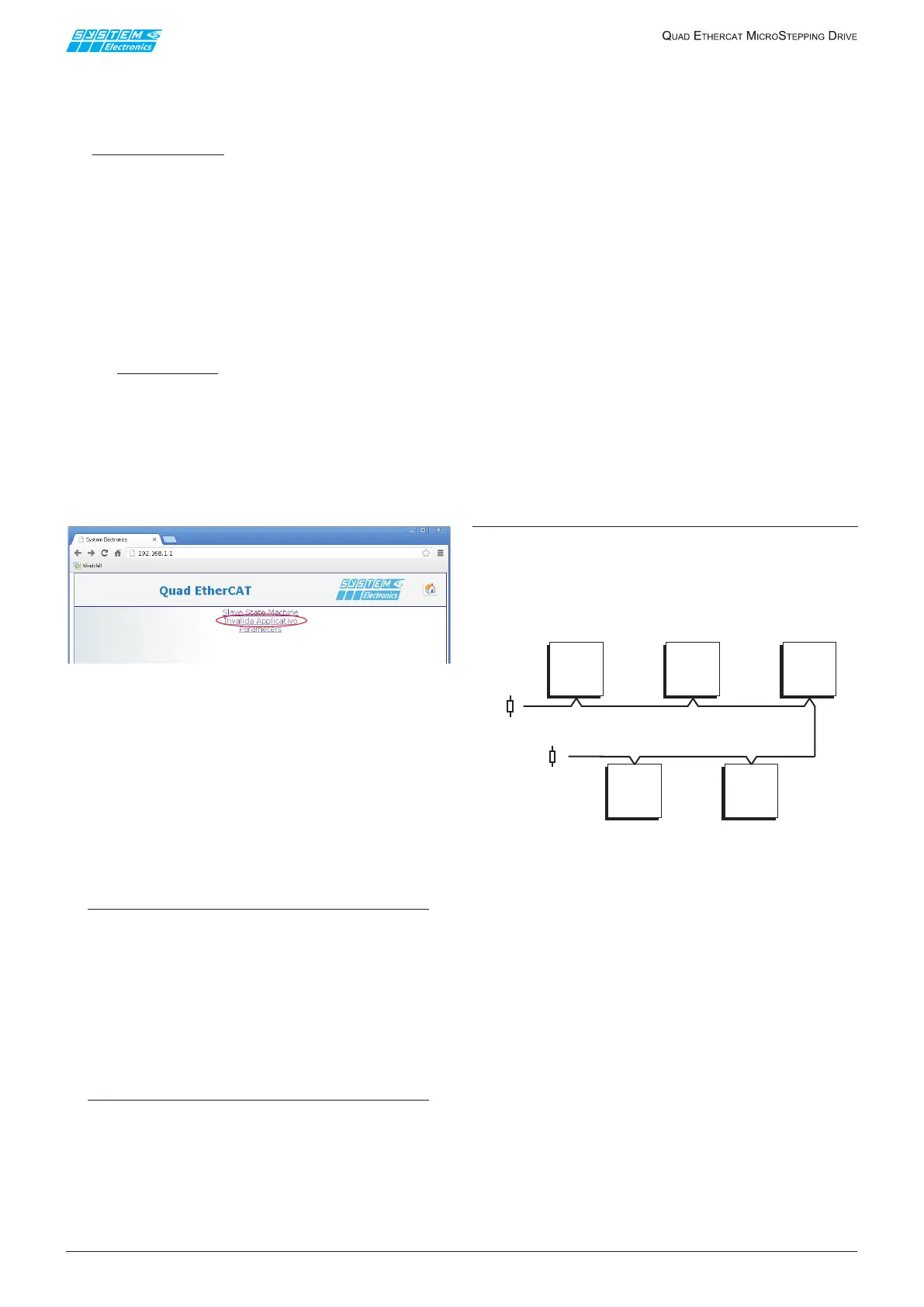
7. WEB interface
Theaxesmanagementrmwarecontainsawebserver
thatallowstointerfacethedrivewithanybrowser.
Figure 7.1
From the Home Page one can access three dierent
pages:
1. “Firmwareinvalidation”and“drivereset”page.
Thispageisveryusefulifonewantstoupdatethe
axesmanagementrmwareviathebrowser.
2. Managementpage(partial)ofthedriveautomaton
state.
3. Webcontrolledmovementsmanagementpage.
NOTE:
The use of the last two pages listed requires the
drive being set (via the front keypad) in CANopen
communication mode (actually, CANopen/
Ethernet) and is strongly unadvised. Ethernet/
HTTP communication, in fact, is not real-time
and is not recommended for controlling motors;
it is only envisaged as an internal tool for System
Spa developers.
NOTE:
Do not connect the Ethernet cable during normal
operation of the drive and replace the connector
protection cap at the end of the operation.
8. CANopen interface
ThedriveisequippedwithaCANcommunicationport
andisdesignedtooperateasaCANopennodeandit
is actually allowed to set (via the front keypad) the
CANopencommunicationmode,aswellastheCANopen
node address, the bit rate (between 10 kbps and 1
Mbps), the insertion of the termination resistor and
theslopecontrol(intheeventthetransmissionrateis
particularlyhigh,i.e.above500kbps).
At present, however, there is NO CANopen object
implemented that allows the use of the drive for axes
management.
Defaultconguration:
• Transmissionspeed500Kbit
• TerminationNOTinserted
• Slopeinserted
For settings refer to paragraphs 3.2.5, 3.2.6 and
3.2.7.
Connection to the CAN network
The physical medium used for the connection is a
shieldedtwo-wirecable.Thearrangementofthenodes
mustbesuchthattheterminationresistorsareplaced
atthetwoendsofthenetwork;itisalsoadvisableto
maketheconnectionsavoidingTconnections.
Figure 8.1
120 ohm
120 ohm
Acceleration = 50000 microstep/s²
50000 * 65536
3906.25²
= 214 (format 16:16)
Jerk = 500 microstep/s²
500 * 2³²
3906.25³
= 36 (format 0:32)