P-I-D values
The proportional component P amplifies the deviation between the set value and the actual
value. The correcting variable is increased by one level (one increment) per X * 0.1 K deviation
from the set value. A large number makes the system more stable and leads to greater control
deviation.
If the set value and the actual value match, the average of the minimum and maximum correcting
variables will be issued as the correcting variable.
Example: Minimum correcting variable 30, maximum correcting variable 100, set value = actual
value -> correcting variable = 65
The integral component I periodically adjusts the correcting variable in relation to the deviation
remaining from the proportional component. For every 1 K of deviation from the set value, the
correcting variable increases by one level every X seconds. A larger number results in a more
stable system, but the correction towards the set value is slower.
The differential component D causes a short-term overreaction the faster a deviation between the
set value and the actual value occurs, in order to correct it as fast as possible. If the actual value
deviates from the set value at a rate of X * 0.1 K per second, the correcting variable will be
changed by one level. Higher values result in a more stable system but correction towards the set
value is slower.
With the help of the cycle time parameter, the readjustment can be influenced via the differential
component. A longer cycle time results in an extended period of influence for the differential
component.
Pump stoppages
If the correcting variable is too small, it could, for example, result in check valves bringing the pump
to a stop. At times that may be desirable, which is why stage 0 is permitted as the lower limit.
To determine the minimum correcting variable, slowly increase the speed stage in manual mode
while observing the pump. The correcting variable at which the pump starts should be increased by
a few levels to be on the safe side, and the result should be applied as the minimum correcting
variable.
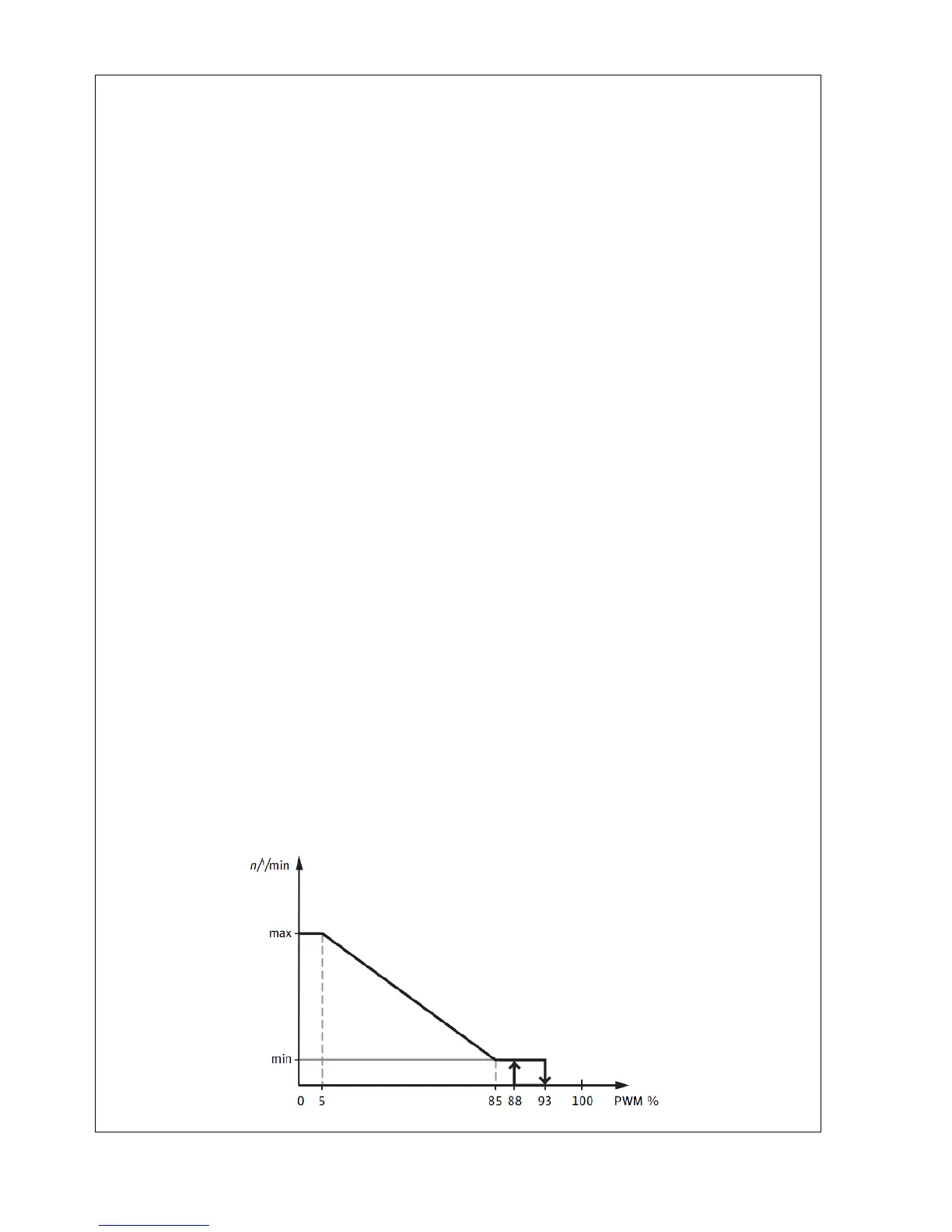
For the control of variable-speed high efficiency [HE] pumps, follow the pump
manufacturer's instructions for the minimum correcting variable and control characteristics
(standard/inverse).
Example: Characteristic of an HE pump with inverse PWM control (Heating mode) (source:
WILO)
 Loading...
Loading...