Special Functions
CAN-Bus Brief Introduction
6-8. CAN-Bus Function(XC5 Series)
z
CAN: Controller Area Network, included in industrial area bus category. Compared with
common communication bus, CAN bus data communication has performance of outstanding
dependability, real time ability and flexibility.
CAN controller works under multi-master format. In the network, each node can send data to
bus according to the bus visit priority. These characters make each node in CAN bus network
has stronger data communication real time performance, and easy to construct redundant
structure, improve the system’s dependability and flexibility.
In CANBUS network, any node can initiatively send message at any time to any other node,
no master and no slave. Flexibility communication, it’s easy to compose multi-device backup
system, distributing format monitor, control system. To fulfill different real time requirement, the
nodes can be divided to be different priority level. With non-destroy bus arbitrament technology,
when two nodes send message to the network at the same time, the low level priority node
initiatively stop data sending, while high level priority node can continue transferring data without
any influence. So there is function of node to node, node to multi-node, bureau broadcasting
sending/receiving data. Each frame’s valid byte number is 8, so the transfer time is short, the
probability ratio is low.
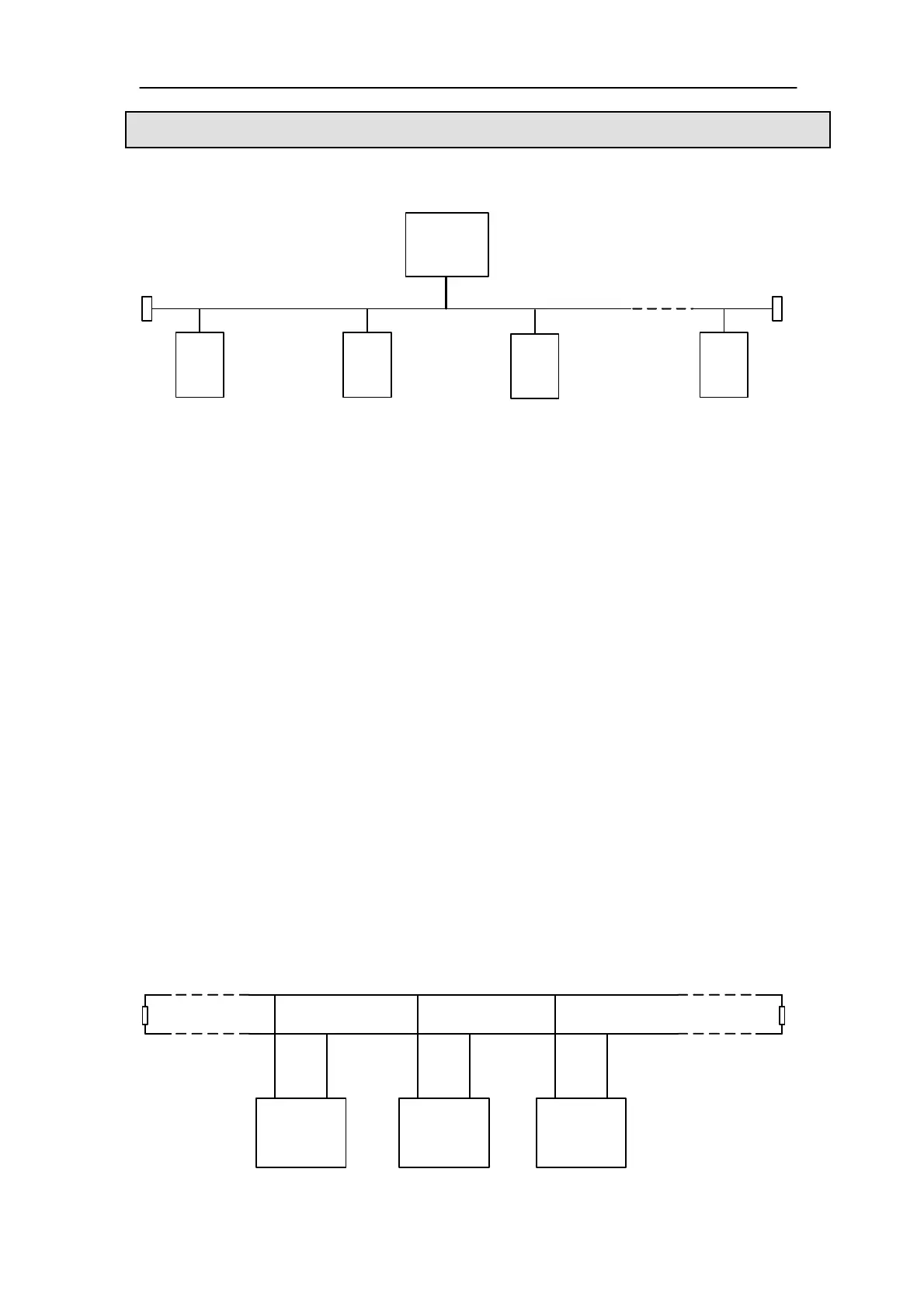
z External Connection
CAN-Bus Communication Port: CAN+, CAN-
The connection among each node of CAN bus is shown in the following, at the two ends, add
120 ohm middle-terminal resistors.
CAN-bus Node
Sub-address 01
CAN-bus Node
Sub-address 02
CAN-bus Node
Sub-address 03
CAN-bus Node
Sub-address 04
Sub-address 00
120R 120R
120R
120R
00
01 02
23