TCY3-T0121R Engineering Manual
Doc: 70-000002 V1.0, 20101115 © Vector Controls GmbH, Switzerland Page 12
Subject to alteration
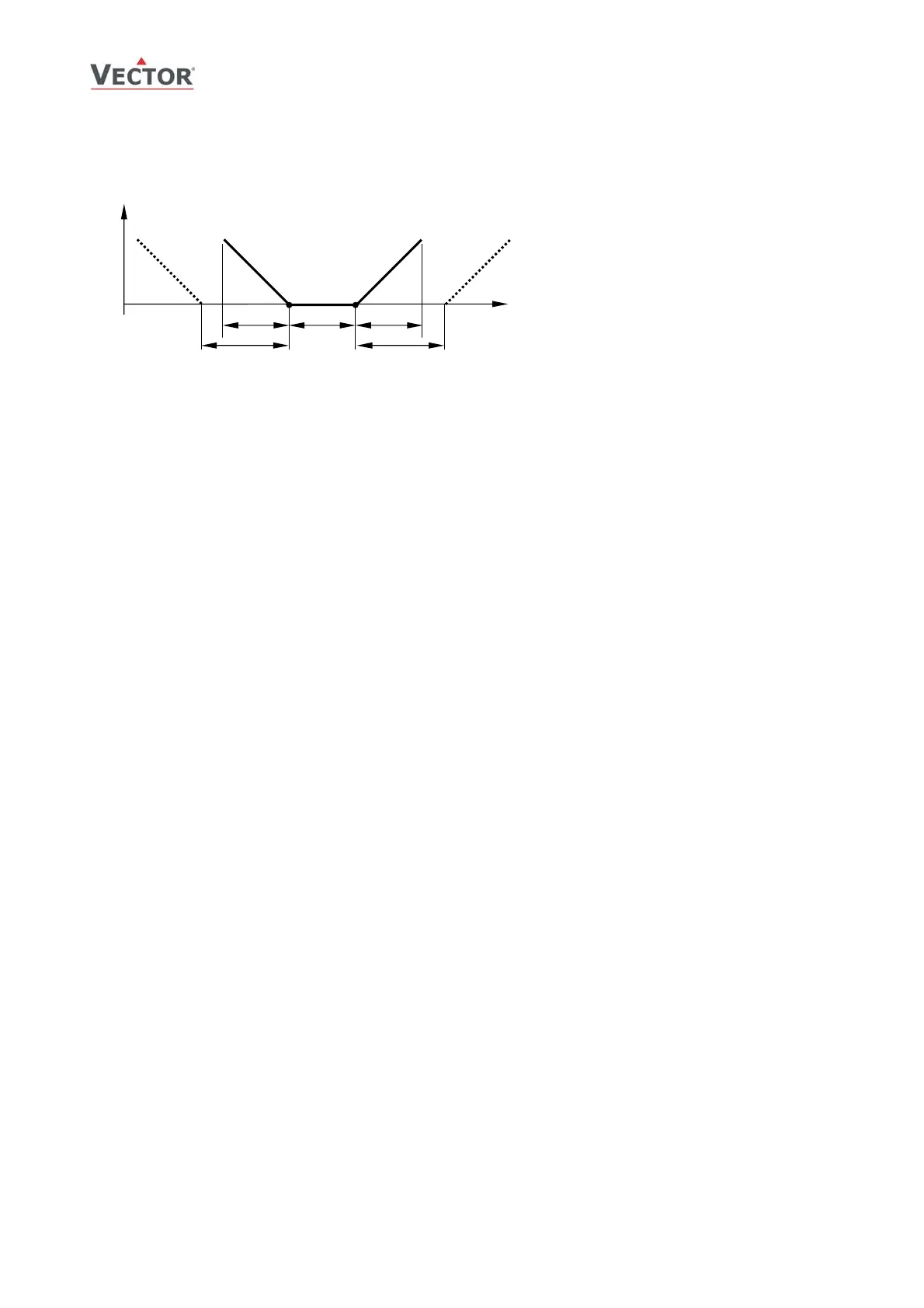
PID-Control
Each loop has one reverse (heating) and one direct (cooling) acting PID sequence.
Legend:
T, U Input Signal
X
PH
P-band Heating, Direct
X
PC
P-band Cooling, Reverse
X
DZ
Dead zone
X
SBY
Standby set point shift
W
H
Set point Heating, Reverse
W
C
Set point Cooling, Direct
Y
H1,
Y
R1
P sequence Heating, Reverse
Y
C1,
Y
D1
P sequence Cooling, Direct
Proportional Control:
Proportional-band X
P
: The proportional part is defined through the p-band. A narrow P-band increases the sensitivity of
the controller. Typical values used are 1 – 1.5K for heating, 2 – 3K for cooling sequences.
The P-band should be extended in case the ID-Part is active, to prevent instability.
Integral & Differential Control:
The algorithm used reduces the swinging tendency of the control loop and improves a direct approach of the current value
to the setpoint. The ID part is defined by two parameters:
The time interval TI specifies how fast the control sequence reacts. A low value (short interval) increases the swinging
tendency and with it the risk of an instable loop. A high value (long interval) slows than reaction time.
The integral gain factor KI specifies how strong the control sequence reacts. Opposite to TI a high gain factor increases
instability and a low factor delays the response of the controller.
We recommend the following values:
For air based heating systems: TI = 3s, KI = 1.0
For floor heating systems: TI = 5s, KI = 0.5
For air cooling systems: TI = 3s, KI = 1.2
For humidifying systems: TI = 60s, KI = 0.4
For dehumidifying systems: TI = 70s, KI = 0.3
Pressure Control (VAV): TI = 1s, KI = 0.8 (depending on speed of actuator KI varies)
Heating, Reverse
Cooling, Direct
100
0
[°C, F]
U [V, mA]
Y
H1
, Y
R1
X
PH
W
H
X
PC
X
DZ
Y
C1,
Y
D1
W
C
X
SBY
X
SBY

 Loading...
Loading...







