67
5.3.1.4 Command pulse prohibition (/INHIBIT)
Position command prohibition, including internal and external position commands. Stop the
function of command pulse input during position control. When the /INHIBIT signal is on, the pulse
command is no longer counted.
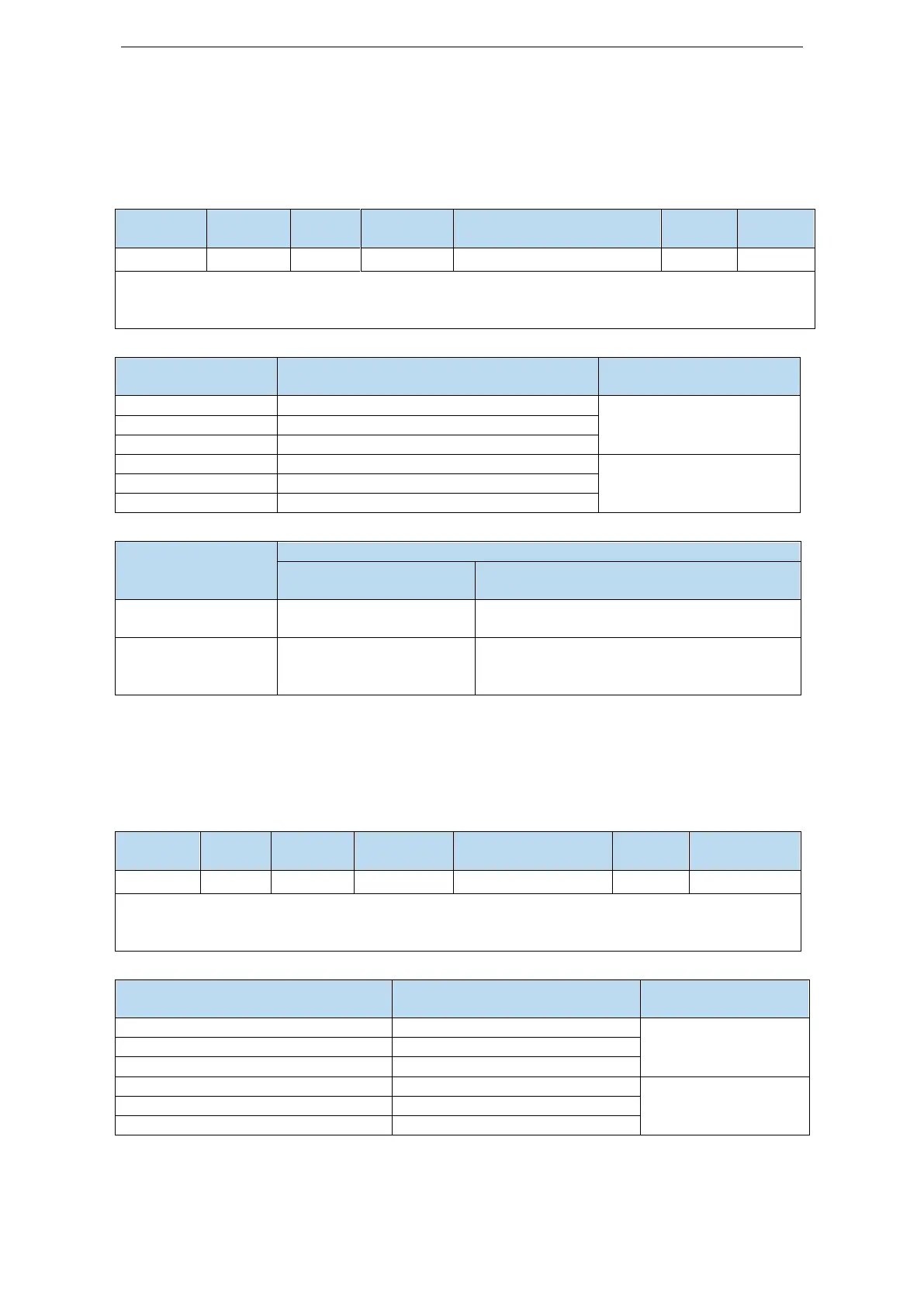
Related parameters
Command pulse prohibition
Parameter range n.0000-001A, assigned to other input terminals by parameter P5-32.
If it is necessary to input from SI2, P5-32 can be set to n.0002/0012. Refer to section 3.2.2 for hardware
wiring details.
1. /INHIBIT terminal effectiveness description
Signal/INHIBIT terminal input status
Signal/INHIBIT terminal
logic
No external terminal input
SI□ terminal has no signal input
SI□ terminal has signal input
No external terminal input
SI□ terminal has signal input
SI□ terminal has no signal input
2. The influence of /INHIBIT terminal signal on the running state of motor
/INHIBIT terminal logic
valid
/INHIBIT terminal logic invalid
5- internal position
control
/INHIBIT signal is from ON→OFF, continue
running from pause point.
6- external pulse
position control
Pause pulse command
reception
/INHIBIT signal is from ON→OFF, continue
running from the pulse command received
after OFF.
5.3.1.5 Offset clear(/CLR)
Position offset=(position command – position feedback)(encoder unit)
The position deviation clearing function means that the driver can clear the position deviation
when the servo is off or the /CLR signal is received.
Related parameters
Parameter range n.0000-001A, assigned to other input terminals by parameter P5-34.
If it is necessary to input signal from SI2, P5-34 can be set to n.0002/0012. Refer to section 3.2.2 for
hardware wiring details.
1. /CLR signal effectiveness
Signal /CLR terminal input status
Signal /CLR terminal
logic
No external terminal input
SI□ terminal has no signal input
SI□ terminal has signal input
No external terminal input
SI□ terminal has signal input
SI□ terminal has no signal input
2. /CLR signal explanation
Send the pulse to the servo, execute the /CLR input signal, the servo will lock the current pulse
counts, then update the current position of the encoder to the position feedback in the control, at the
 Loading...
Loading...
