3.1 Basic Functionality
Programs
3-15
Refer to the following manuals for details on programming examples for controlling motion programs.
MP3000 Series Motion Programming Manual (Manual No.: SIEP C880725 14)
• Interpolation Override
An interpolation override allows you to change the output ratio of the axis movement speed reference for
interpolation motion language instructions.
Set the override value to use when executing interpolation instructions (MVS, MCW, MCC, or SKP).
The interpolation override is valid only when bit E (Interpolation Override Setting) in the control signals is
ON.
The setting range of the interpolation override is 0 to 32,767.
Unit: 1 = 0.01%
•System Work Numbers
When you call a motion program from a ladder program with the MSEE instruction, set the system work
number to use to call the motion program. This system work number is valid only when bit D (System
Work Number Setting) of the control signals is ON.
Setting range: 1 to 32
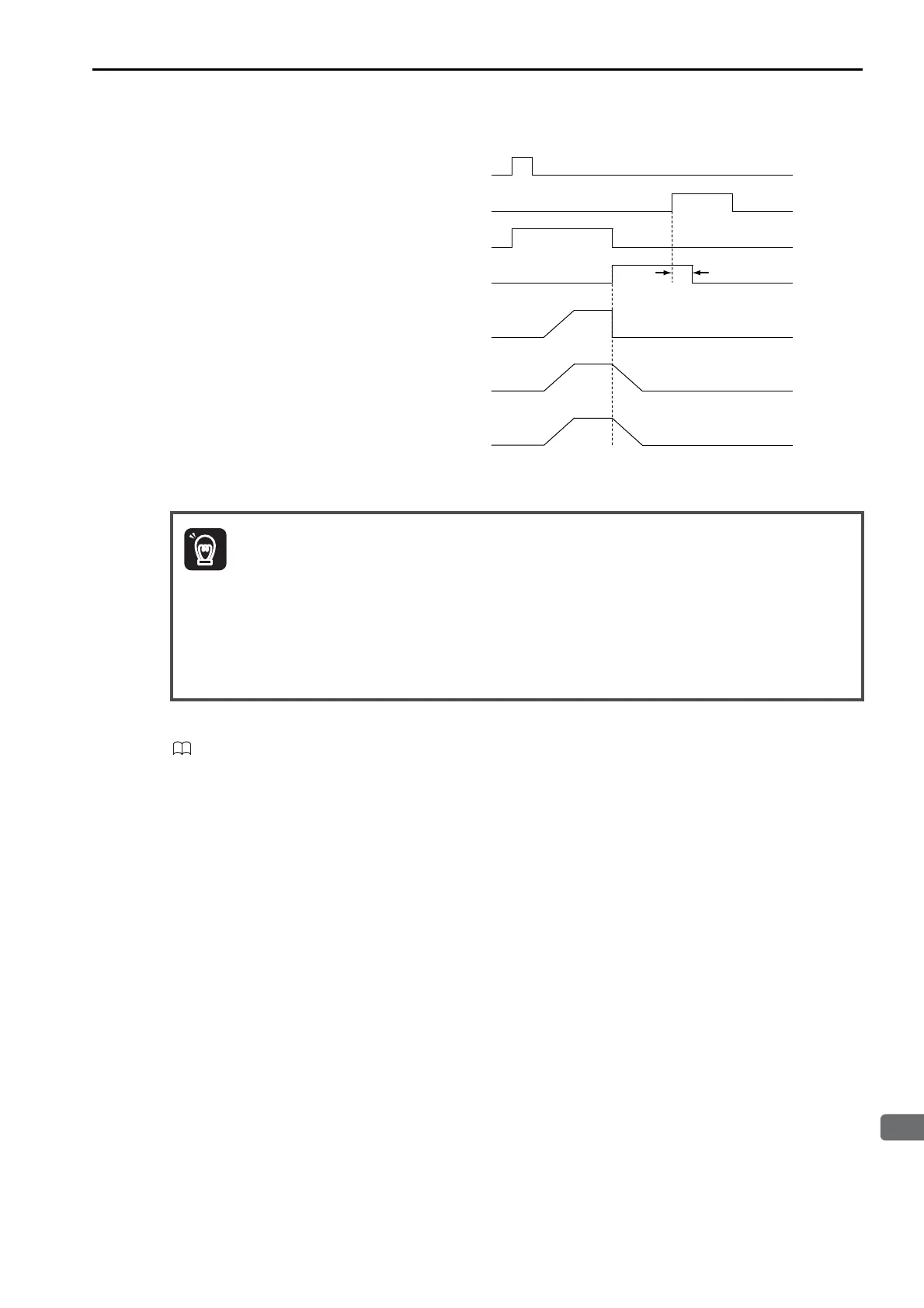
If a Motion Program Alarm Occurs
* Status flags related to control signal input are updated after one scan.
1. If the Request for Stop of Program control signal is turned ON while the axis is being controlled for
a motion language instruction, an alarm will occur.
2. If the Request for Stop of Program control signal is turned ON while the axis is being controlled for
an interpolation motion language instruction, the axes will stop immediately. To perform a deceler-
ation stop, use the Request for Pause of Operation control signal.
3. The Request for Pause of Program control signal is not acknowledged while a Zero Point Return
(ZRN) instruction is being executed. To stop the operation, use the Request for Stop of Program
control signal.
4. If a motion program alarm occurs while an axis is in motion, the axis stops immediately.
Control signal: Request for Start of
Program Operation
Status flag: Program Alarm
Status flag: Program Executing
Axis operation: Pulse distribution for
Interpolation instruction
Control signal: Program Reset and Alarm
Reset Request
Axis operation: Pulse distribution for
Positioning instruction
Axis operation: Pulse distribution for
Zero Point Return instruction
1 scan*