36
Selection of Servomotor Size
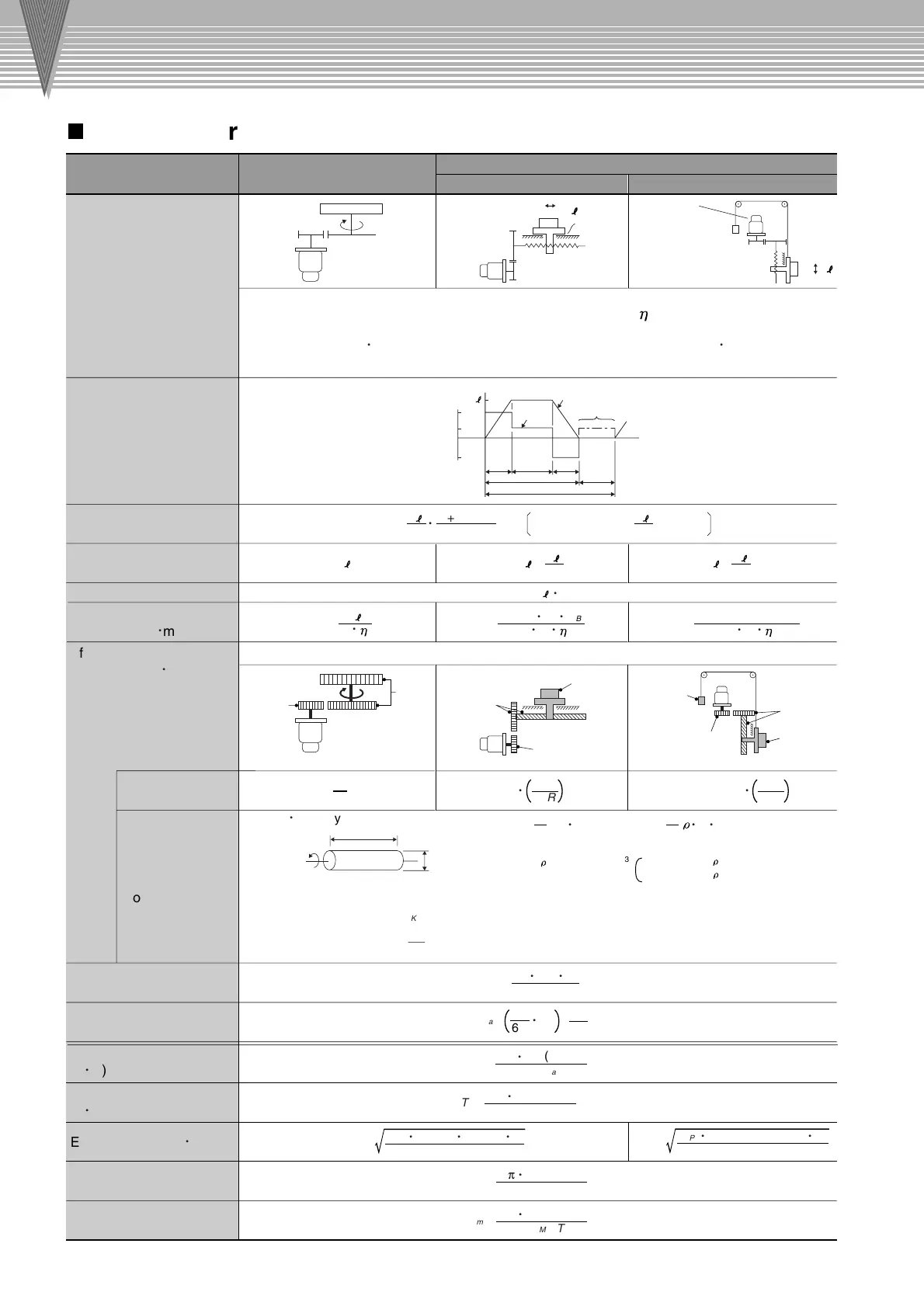
Selection of Servomotor Size
Motions Rotational Motion
Linear Motion
Horizontal Axis Vertical Axis
Mechanical Configuration
Speed Diagram
Travel Distance (m)
Min. Starting Time
(
S
)
Min. Braking Time
(
S
)
Running Power (W)
Acceleration Power (W)
Load axis speed
(min
-1
)
Motor Speed (min
-1
)
Effective Load Torque at
Motor Shaft
(
N
m
)
Required Starting Torque
(
N
m
)
Required Braking Torque
(
N
m
)
Effective
Torque
(
N
m
)
Effective Load Inertia at
Motor Shaft (kg
m
2
)
Rotational Motion
Linear Motion
Servomotor
R =
2
Servomotor
Lead :
P
B
Lead :
P
B
Servomotor
Counterbalance
Speed
Speed
For motion of vertical axis
Torque
Torque
Cycle time
t
(
s
)
0
9.8
×
µ
M
P
B
P
B
2π
N
M
(
J
M
+
J
L
)
2
<Inertia for motor shaft>
At gear input side
Solid cylinder
= 7.87
×
10
3
(
kg/m
3
)
= 2.70
×
10
3
(
kg/m
3
)
8
1
L
(m)
At gear output side
V
V
T
p
T
L
T
S
t
a
t
c
t
m
t
e
t
d
V
M
C
N
R
NN
=
N
M
=
N
R
V
P
B
2
t
a
+ 2
t
c
+
t
d
Where
t
a
=
t
d
,
P
B
: Ball screw lead (m)
M
:
Mass of linear-motion unit (kg)
M
C
:
Mass of counterbalance (kg)
M
µ
M
1/R
1/R
1/R
60
V
N
=
V
P
B
J
L3
J
L3
J
L2
J
L1
J
L1
J
L1
J
L3
J
L2
J
L2
T
T
L
=
T
L
=
J
L
=
J
L1
+
J
L2
+
J
L3
J
L1
=
(
M
+
M
C
)
J
L1
=
M
2π
R
9.8
×
(
M
–
M
C
)
P
B
T
L
=
2
P
B
2π
R
J
K
=
M
K
D
2
or
J
K
=
L
D
4
J
L2
=
J
K
J
L3
=
J
K
R
2
t
am
=
2π
N
M
(
J
M
+
J
L
)
t
dm
=
2π
N
M
T
L
60
P
0
=
2π
60
N
M
P
a
=
J
L
t
a
2π
N
M
(
J
M
+
J
L
)
60
×
t
a
T
P
=
+
T
L
2π
N
M
(
J
M
+
J
L
)
60
×
t
d
T
S
=
–
T
L
T
P
2
t
a
+
T
L
2
t
c
+
T
S
2
t
d
T
rms
=
t
T
P
2
t
a
+
T
L
2
(
t
c
+
t
e
)
+
T
S
2
t
d
T
rms
=
t
D
(m)
Formulas for Selecting Servomotor Capacity
R =
(
tm
–
ta
)
60
V
32
: Mass (kg)
: Density (kg/m
3
) Iron
Aluminum
M
K
Load axis speed (min
-1
)
Load speed (m/min)
Effective load torque
at motor shaft (N
m)
Friction coefficient
N
:
V
:
T
:
µ :
:Gear ratio
:Combined efficiency
:Servomotor maximum
torque (N
m)
1/R
T
M
R
2π
R
2π
R
π
60
(
T
M
–
T
L
)
60
(
T
M
+
T
L
)