6.3 Programming Pendant
6-5
6.3 Programming Pendant
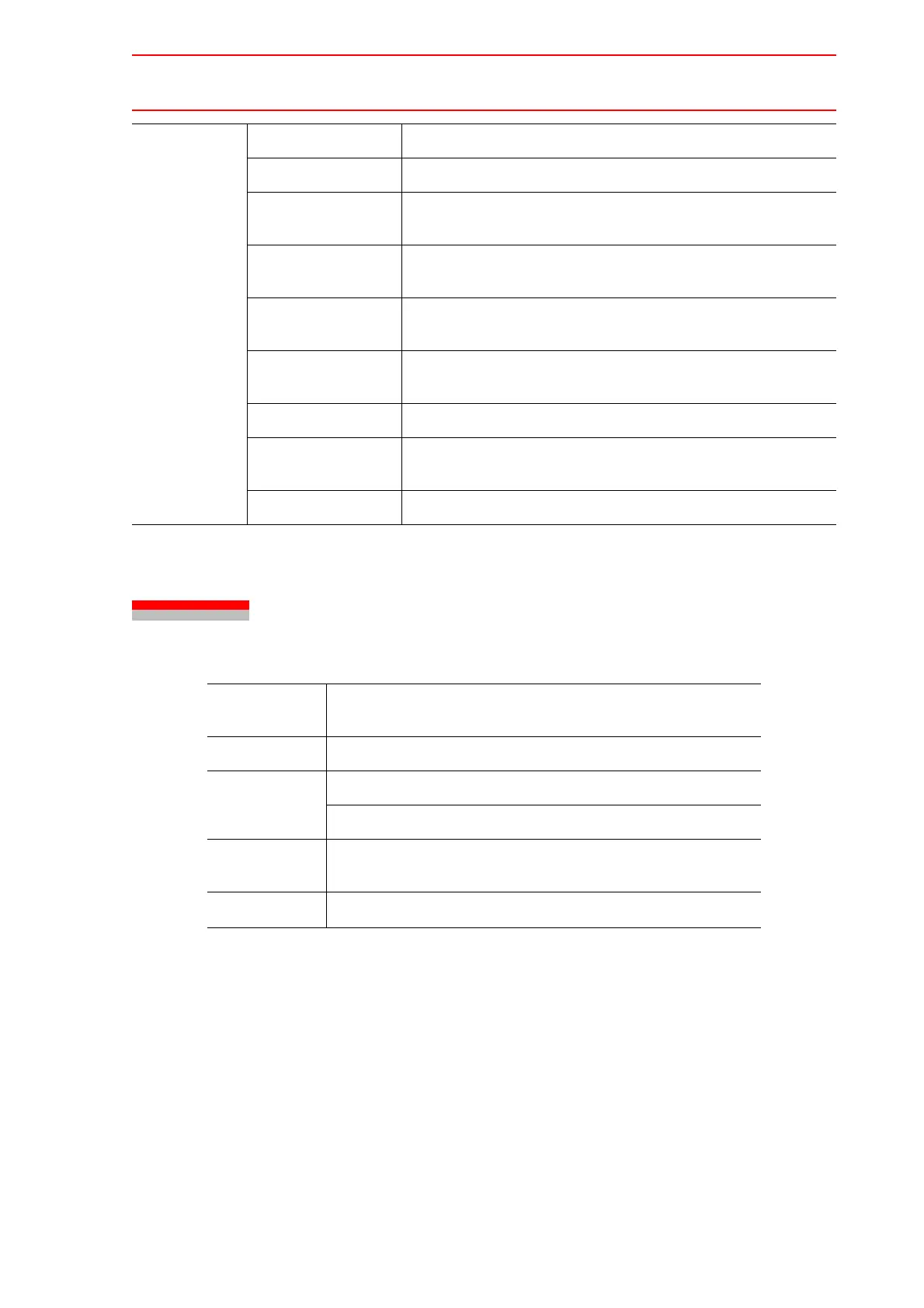
Programing
Functions
Programming Interactive programming
Language Robot language: INFORM II
Robot Motion Con-
trol
Joint coordinates, Linear/Circular interpolations, Tool coordi-
nates
Speed Setting Percentage for joint coordinates, 0.1mm/s units for interpola-
tions, Angular velocity for T.C.P. fixed motion
Program Control
Instructions
Jumps, Calls, Timer, Robot stop, Execution of some instruc-
tions during manipulator motion
Operation Instruc-
tions
Preparing the operation instructions for each application Arc
(ON), Arc (OFF), etc..
Variable Global variable, Local variable
Variable Type Byte type, Integer-type, Double precision-type, Real type,
Position type
I/O Instructions Discrete I/O, Pattern I/O processing
Material Reinforced thermoplastic enclosure with a detachable sus-
pending strap
Dimensions 199(W) × 338(H) × 60(D) mm
Displayed
Units
TFT Color liquid crystal display, 6.5 inch, VGA (640 × 480)
Touch panel
Operated
Units
3 position enable switch, Start switch, Hold switch,
Mode select switch (3 mode)
Others
Provided with CF (Compact Flash) card slot

 Loading...
Loading...








