Page - 20/90 AF9ZP0BA - EPS-ACW REACH TRUCK - User Manual
9.5.1.3 Feedback Encoder
One big advantage of our epsacW controller is that it can work with a cost-
effective very low-resolution encoder. It consists of a multipole magnet (4 pole
pairs) engaging two digital hall sensors leading to a resolution of 4pulses/rev.
That is more than enough for the angle measurement: in fact, with a total
reduction ratio of 1:200 and a 4 pulses/revs resolution, we have 1600 events
(encoder transitions) within 180° of the steered angle. So the angle
measurement is determined with quanta of 180/1600=0.112 degrees.
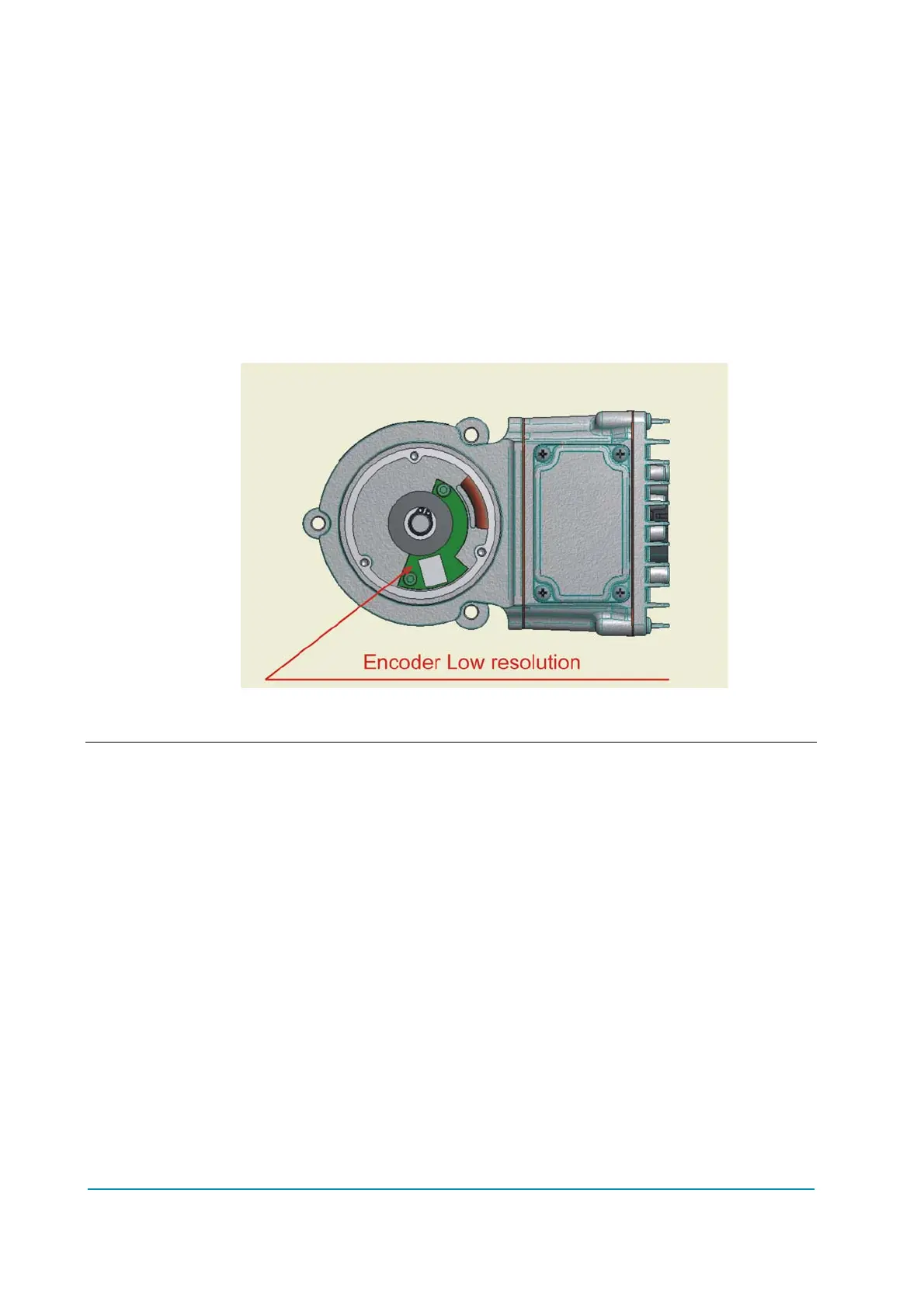
Following this statement, we have developed, together with the Zapi AC-motors-
manufacturer, a 4 pulses/rev discrete encoder. It is an external device (not
integrated in the ball bearing) mounted in the backside of the motor (see Figure
9.5.1.3-1). The advantages of this solution are both, money saving and effective
time saving in case of encoder replacement.
Figure 9.5.1.3-1
4 Note: The SW must know the encoder resolution together with the poles-pair
number. The encoder resolution and the motor pole pairs (the controller can
handle), will be specified in the headline of the handset showing something like:
EPSWSM 1Q NA4.98
That means:
EPSW = EpsacW steering controller
S= Open Loop Mode (Stepper motor).
M= Master Microcontroller
X= type of sensor in the TFD
1= poles pair number
Q= 4 pulses/rev encoder
NA= SW release type Nacco
4.98= SW release number 4.98
The command configuration is specified through the first two letter after EPS in
the following list:
WS= Open Loop (Stepper Motor) for Warehouse Trucks