ZMC420SCAN Motion Controller
1.2
Installation and programming
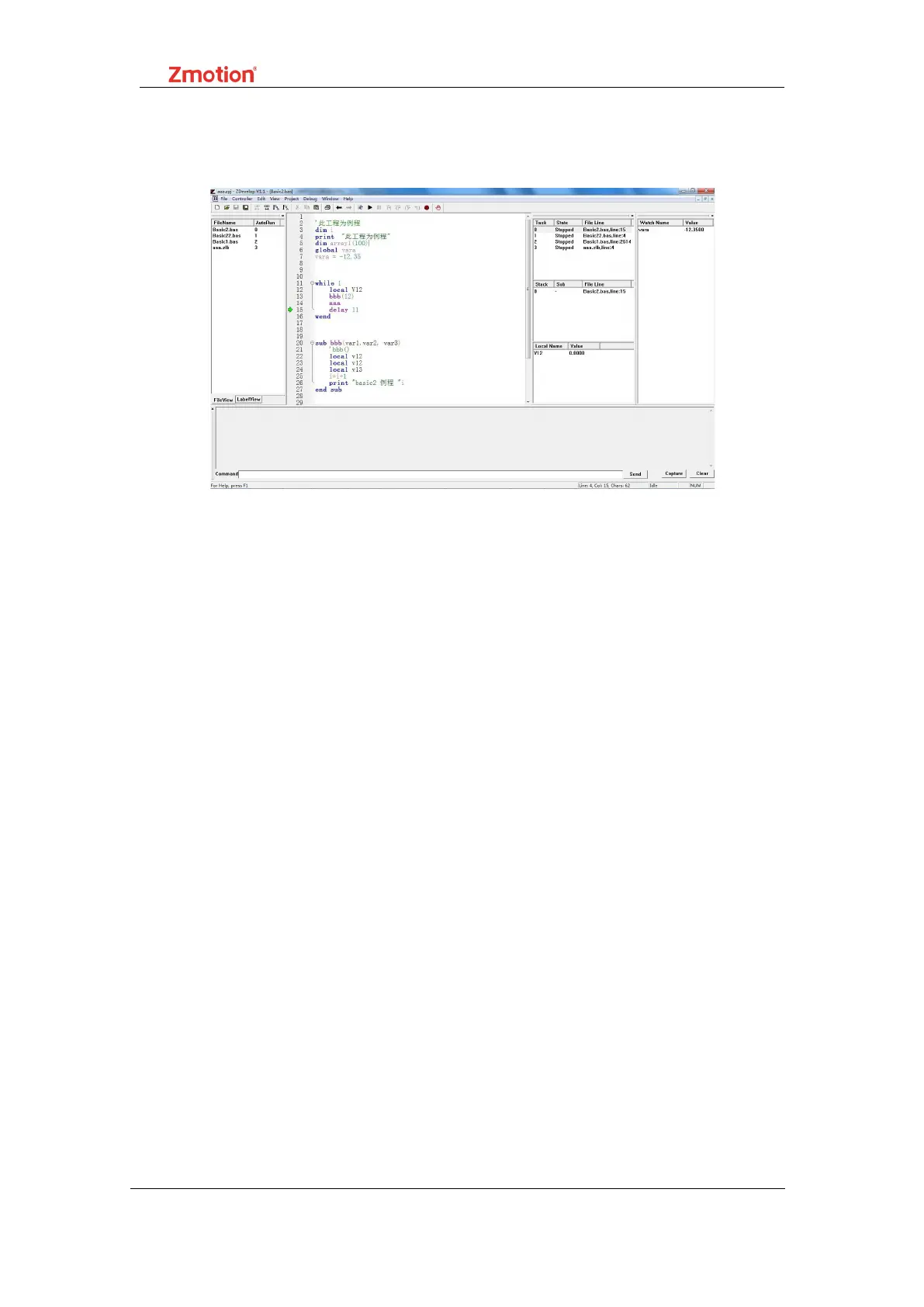
ZDevelop development environment
The ZMC controller is debugged through the ZDevelop development
environment. ZDevelop is a very convenient programming, compilation
and debugging environment. ZDevelop can establish a connection with
the controller via serial port, 485, USB or Ethernet.
The program can be developed using VC, VB, VS, C ++ Builder, C #,
etc. software. When debuggingZDevelop software is connected to the
controller at the same time, and the dynamic library zmotion.dll is
needed when the program runs.
1.3
Features
● Up to 20-axis motion control (4 pulse axis + EtherCAT axis /
RTEX axis / encoder axis / galvanometer axis / virtual axis).
● Pulse axis output mode: direction / pulse or double pulse.
● Galvanometer axis output mode: XY2-100 protocol.
● Support encoder position measurement, can be configured as handwheel
input mode.
● Maximum output pulse frequency of each axis 10MHz
● by EtherCAT bus,Can be expanded up to 4096 isolated input or output
ports.
● Axis positive / negative limit signal port / origin signal port can
be configured as any input port at will.
● The maximum output current of the output port can reach 300mA,
with two 500mA high current output ports, can directly drive
 Loading...
Loading...