2.3 Process interface ESAB Aristo™ Mig, external equipment, B_AW_OPT_14
Introduction
This chapter describes the standard process configuration delivered by ABB
Robotics. Process Interface DeviceNet for ESAB Aristo™ Mig, external equipment,
Torch Cleaner, Wire Cutter, and BullsEye.
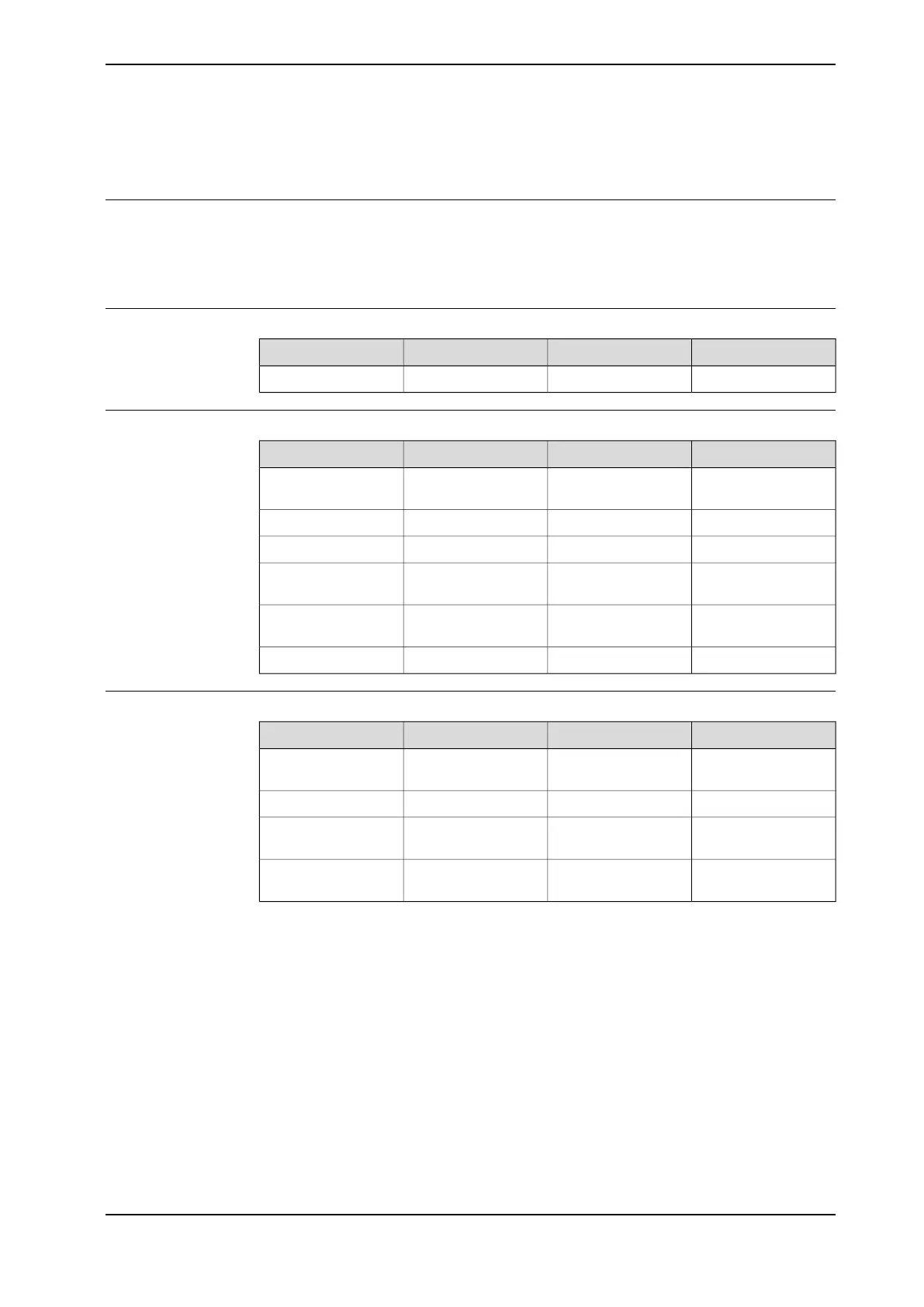
Board configuration
BusBoard typeNameAddress
CAN DeviceNetDigital I/O boardB_AW_OPT_1441
Digital outputs
DescriptionNameConnectionDevice Map
Mechanical torch
cleaning
doMCLN_TCHX1:10
Torch lubricationdoMLUB_TCHX1:21
Wire cutterdoWIRE_CUTX1:32
Mechanical torch
cleaning (robot 2)
doMCLN_TCH_2X1:43
Torch lubrication (ro-
bot 2)
doMLUB_TCH_2X1:54
Wire cutter (robot 2)doWIRE_CUT_2X1:65
Digital inputs
DescriptionNameConnectionDevice Map
Torch cleaning fin-
ished
diMCLN_FINX3:10
BullsEye sensorsen1X3:21
Torch cleaning fin-
ished (robot 2)
diMCLN_FIN_2X3:32
BullsEye sensor (ro-
bot 2)
sen2X3:43
Application manual - Signal description for arc welding products 17
3HAC050975-001 Revision: -
© Copyright 2004-2016 ABB. All rights reserved.
2 Signal configuration
2.3 Process interface ESAB Aristo™ Mig, external equipment, B_AW_OPT_14