Chapter 6 – Communication
NCAN-02 Installation and Start-up Guide 6-19
Drive Actual Signals and
Parameters
The actual signals and parameters available depend on drive type. See
the drive documentation for signal and parameter listings.
The Read service is used for reading actual signals and parameters
from the drive. The Write service is used for writing parameter values
to the drive.
Both the Read and Write services use the same parameter mapping
system. CANopen Index equals ((Drive Param./Signal No.) • 100 +
12288), converted to hexadecimal. For example, the Index for drive
parameter 30.19 equals 3019 + 12288 = 15307 = 3BCBh.
Sub-index is always 0.
The application error codes are a small subset of the error classes of
the PROFIBUS specification (EN 50170). The codes are 4-byte values
containing the Error Class, Error Code, and Additional Code (always 0
with NCAN-02) fields.
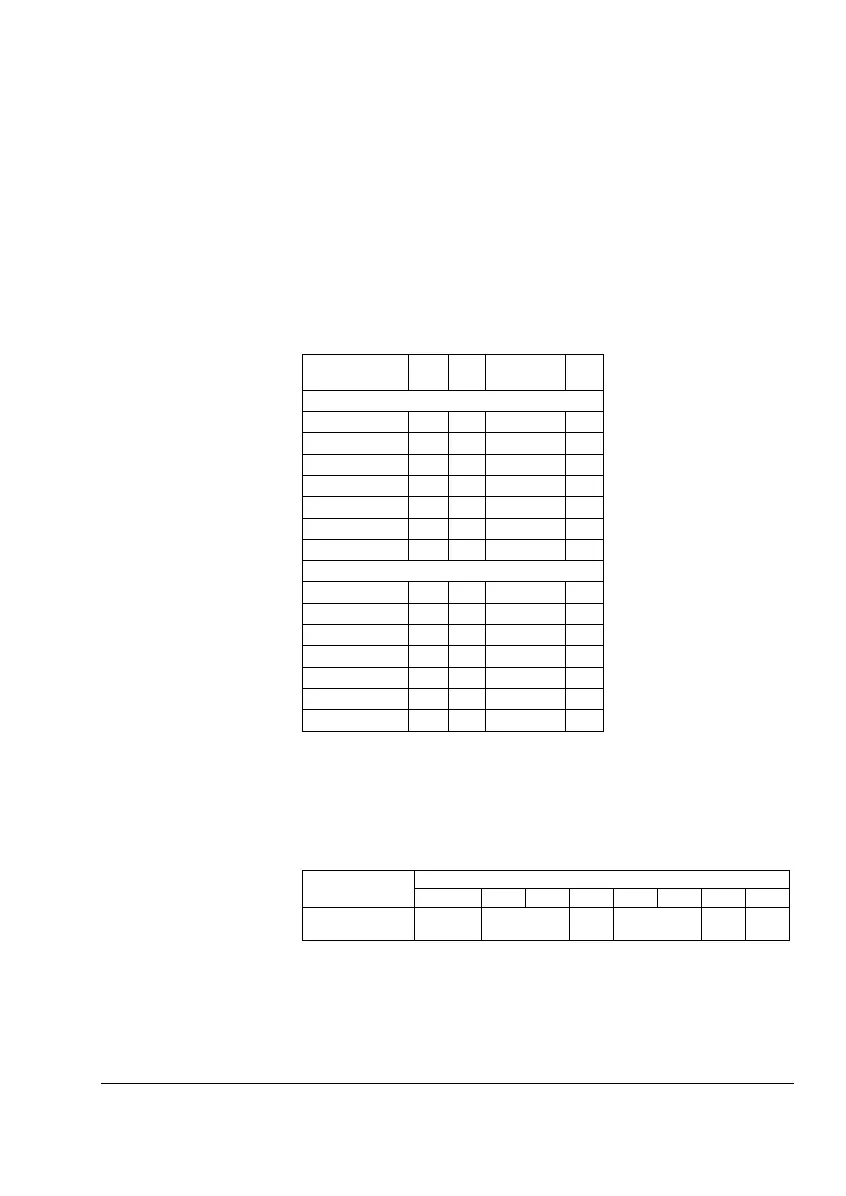
Drive Parameter/
Signal No.
Index
(Hex)
Sub-
index
Type
Attri-
bute
ACTUAL SIGNALS
1.01 3065 0 Integer16 RO
1.02 3066 0 Integer16 RO
• • • • • • • • • • • • • • •
2.01 30C9 0 Integer16 RO
• • • • • • • • • • • • • • •
3.01 312D 0 Integer16 RO
• • • • • • • • • • • • • • •
PARAMETERS
10.01 33E9 0 Integer16 RW
10.02 33EA 0 Integer16 RW
• • • • • • • • • • • • • • •
11.01 344D 0 Integer16 RW
• • • • • • • • • • • • • • •
99.01 56AD 0 Integer16 RW
• • • • • • • • • • • • • • •
Slave to Master
Header
Byte
1 2345678
1101xxxxxxx01000 Command Object Index
Sub-
index
Additional
Code
Error
Code
Error
Class
 Loading...
Loading...










