复
制
代
码
Install and use can-utils to test hardware
复
制
代
码
If the can-to-usb has been connected to the BUNKER robot this time, and the car has been
turned on, use the following commands to monitor the data from the BUNKER chassis
复
制
代
码
Please refer to:
[1] https://github.com/agilexrobotics/agx_sdk
[2] https://wi-ki.rdu.im/_pages/Notes/Embedded-System/Linux/-can-bus-in-linux.html
AGILEXTRACERMINIROSPACKAGEDownloadandcompile
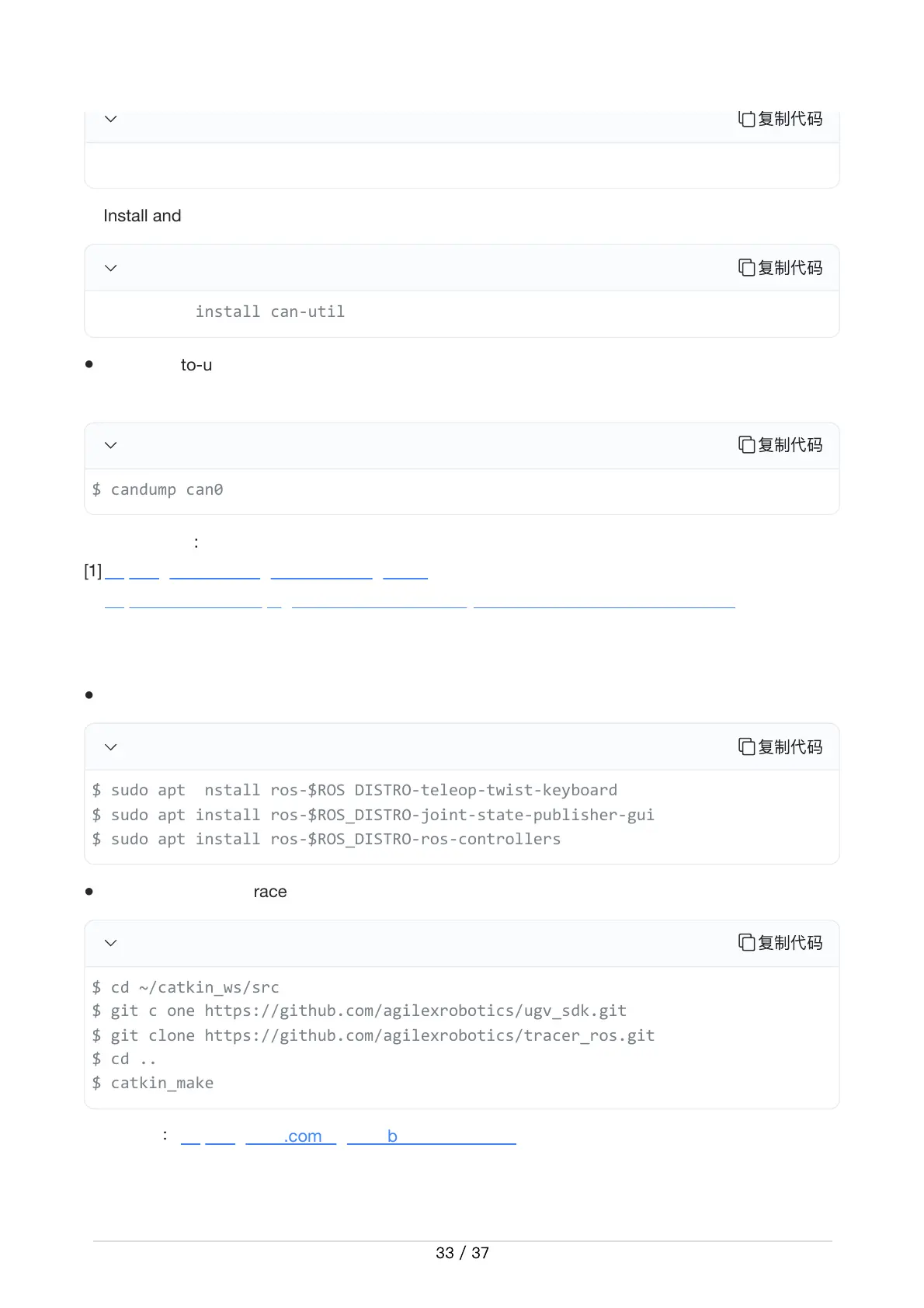
Download ros dependencies
复
制
代
码
clone and compile tracer_ros source code
复
制
代
码
Reference
:
https://github.com/agilexrobotics/tracer_ros
$ sudo apt install ros-$ROS_DISTRO-teleop-twist-keyboard
$ sudo apt install ros-$ROS_DISTRO-joint-state-publisher-gui
$ sudo apt install ros-$ROS_DISTRO-ros-controllers
$ cd ~/catkin_ws/src
$ git clone https://github.com/agilexrobotics/ugv_sdk.git
$ git clone https://github.com/agilexrobotics/tracer_ros.git
$ cd ..
$ catkin_make