2-138 Process PI Loop
control by itself is a ramp output correction. This type of control gives a
smoothing effect to the output and will continue to integrate until zero error
is achieved. By itself, integral control is slower than many applications
require and therefore is combined with proportional control (PI).
Derivative Control (D) adjusts the output based on the rate of change of the
error and, by itself, tends to be unstable. The faster that the error is
changing, the larger change to the output. Derivative control is generally not
required and, when it is used, is almost always combined with proportional
and integral control (PID).
The PI function can perform a combination of proportional and integral
control. It does not perform derivative control, however, the accel / decel
control of the drive can be considered as providing derivative control.
There are two ways the PI Controller can be configured to modify the
commanded speed.
• Process Trim - The PI Output can be added to the master speed reference
• Process Control - PI can have exclusive control of the commanded speed.
The selection between these two modes of operation is done in the [PI
Configuration] parameter.
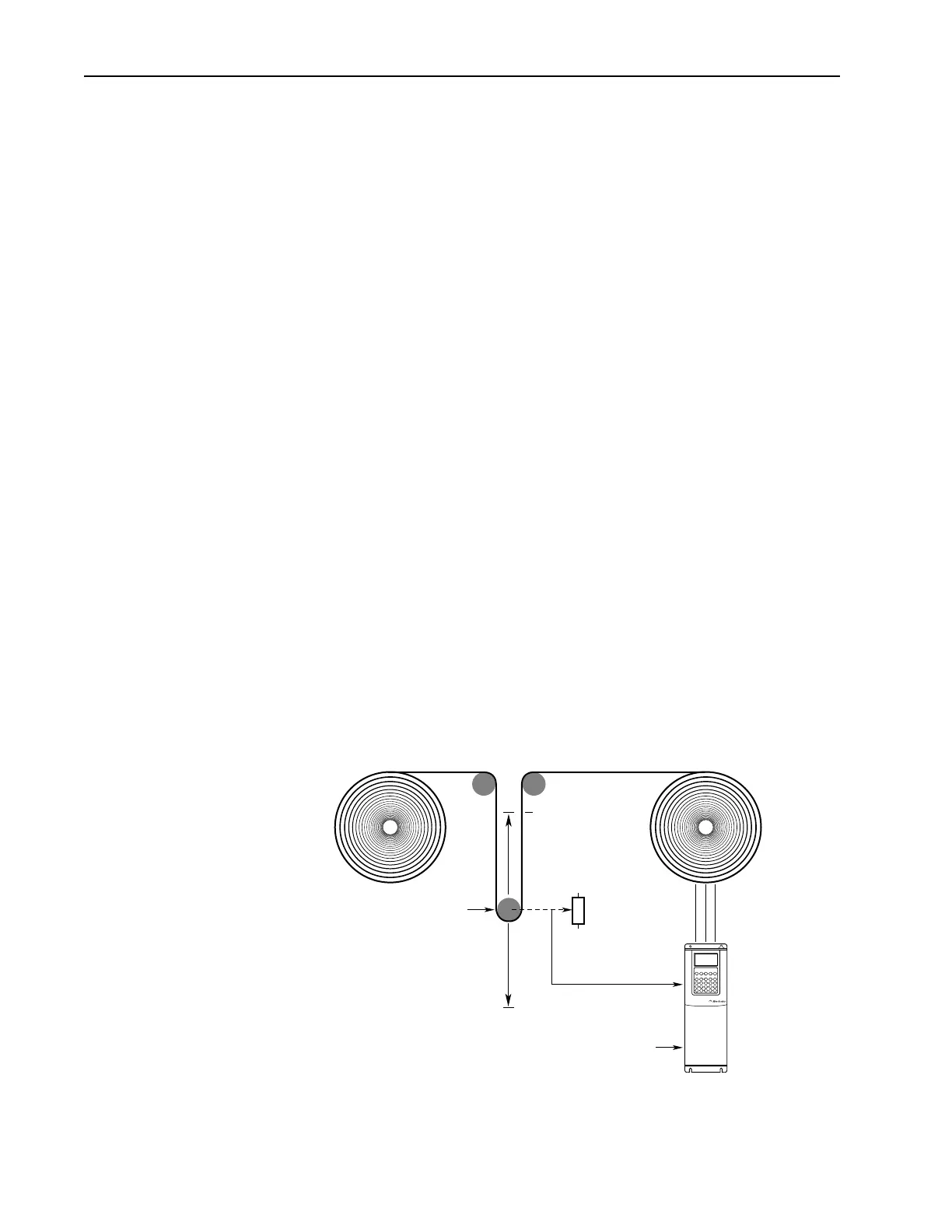
Process Trim
Process Trim takes the output of PI regulator and sums it with a master
speed reference to control the process. In the following example, the master
speed reference sets the wind/unwind speed and the dancer pot signal is
used as a PI Feedback to control the tension in the system. An equilibrium
point is programmed as PI Reference, and as the tension increases or
decreases during winding, the master speed is trimmed to compensate and
maintain tension near the equilibrium point.
When the PI is disabled the commanded speed is the ramped speed
reference.
Master Speed Reference
10 Volts
0 Volts
Dancer Pot
[PI Feedback Sel]
Equilibrium Point
[PI Reference Sel]

 Loading...
Loading...








