2-142 Process PI Loop
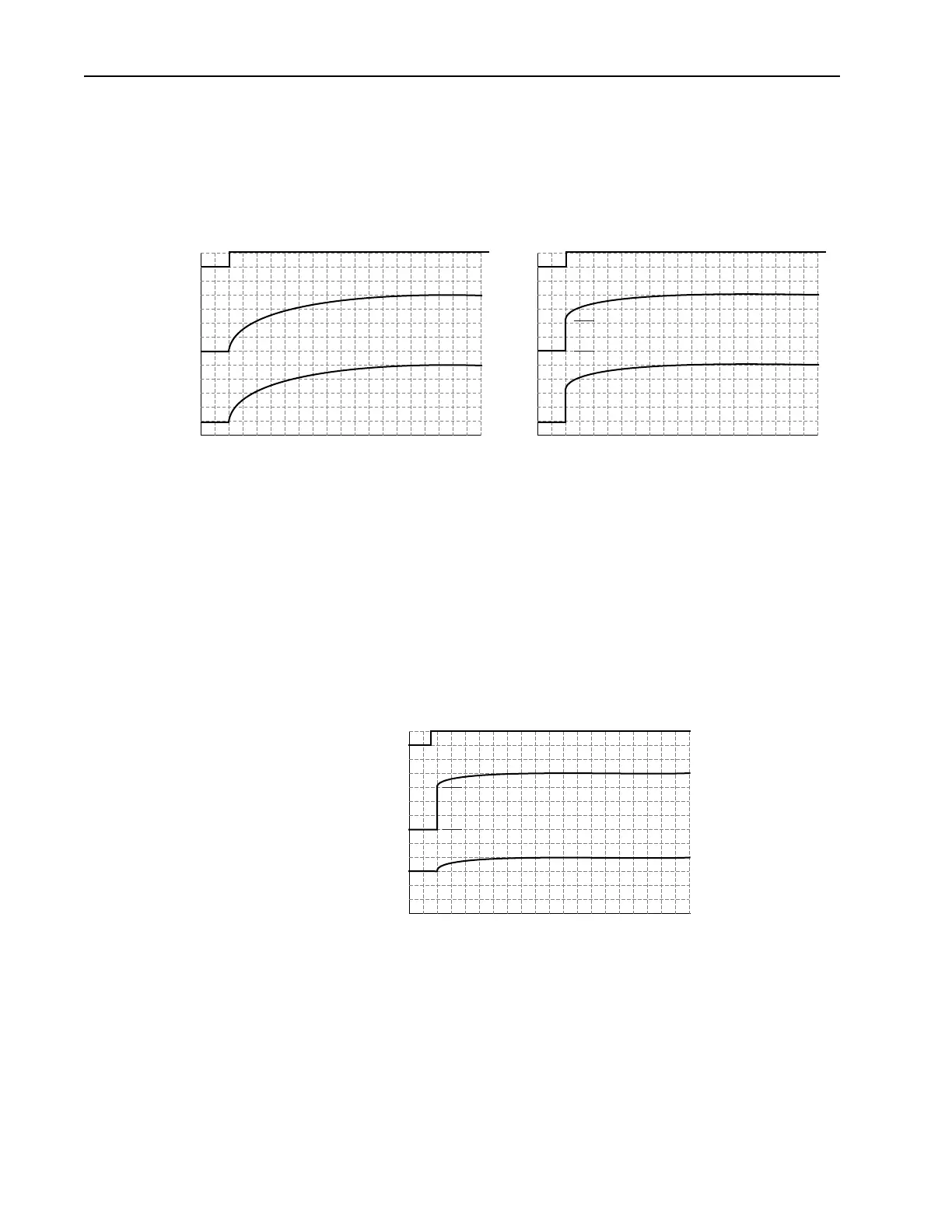
As below shown on the left, when the PI is enabled the PI output will
start from zero and regulate to the required level. When PI is enabled
with PI Load Value is set to a non-zero value the output begins with a
step as shown below on the right. This may result in the PI reaching
steady state sooner, however if the step is too large the drive may go
into current limit which will extend the acceleration.
Pre-load command may be used when the PI has exclusive control of
the commanded speed. With the integrator preset to the commanded
speed there is no disturbance in commanded speed when PI is
enabled. After PI is enabled the PI output is regulated to the required
level.
When the PI is configured to have exclusive control of the
commanded speed and the drive is in current limit or voltage limit the
integrator is preset to the commanded speed so that it knows where to
resume when no longer in limit.
• Ramp Ref - The PI Ramp Reference feature is used to provide a
smooth transition when the PI is enabled and the PI output is used as a
speed trim (not exclusive control),.
PI Enabled
Spd Cmd
PI Output
PI Pre-load Value
PI Pre-load Value = 0 PI Pre-load Value > 0
Pre-load to Command Speed
PI Enabled
Spd Cmd
PI Output
Start at Spd Cmd
 Loading...
Loading...









