Process PI Loop 2-141
Configuration
To operate the drive in PI Regulator Mode for the Standard Control option,
change the mode by selecting “Process PI” through the [Speed Mode]
parameter.
Three parameters are used to configure, control, and indicate the status of
the logic associated with the Process PI controller; [PI Configuration], [PI
Control], and [PI Status]. Together these three parameters define the
operation of the PI logic.
1. [PI Configuration] is a set of bits that select various modes of operation.
The value of this parameter can only be changed while the drive is
stopped.
• Exclusive Mode - see page 2-139
.
• Invert Error - This feature changes the “sign” of the error, creating a
decrease in output for increasing error and an increase in output for
decreasing error. An example of this might be an HVAC system with
thermostat control. In Summer, a rising thermostat reading commands
an increase in drive output because cold air is being blown. In Winter,
a falling thermostat commands an increase in drive output because
warm air is being blown.
The PI has the option to change the sign of PI Error. This is used
when an increase in feedback should cause an increase in output.
The option to invert the sign of PI Error is selected in the PI
Configuration parameter.
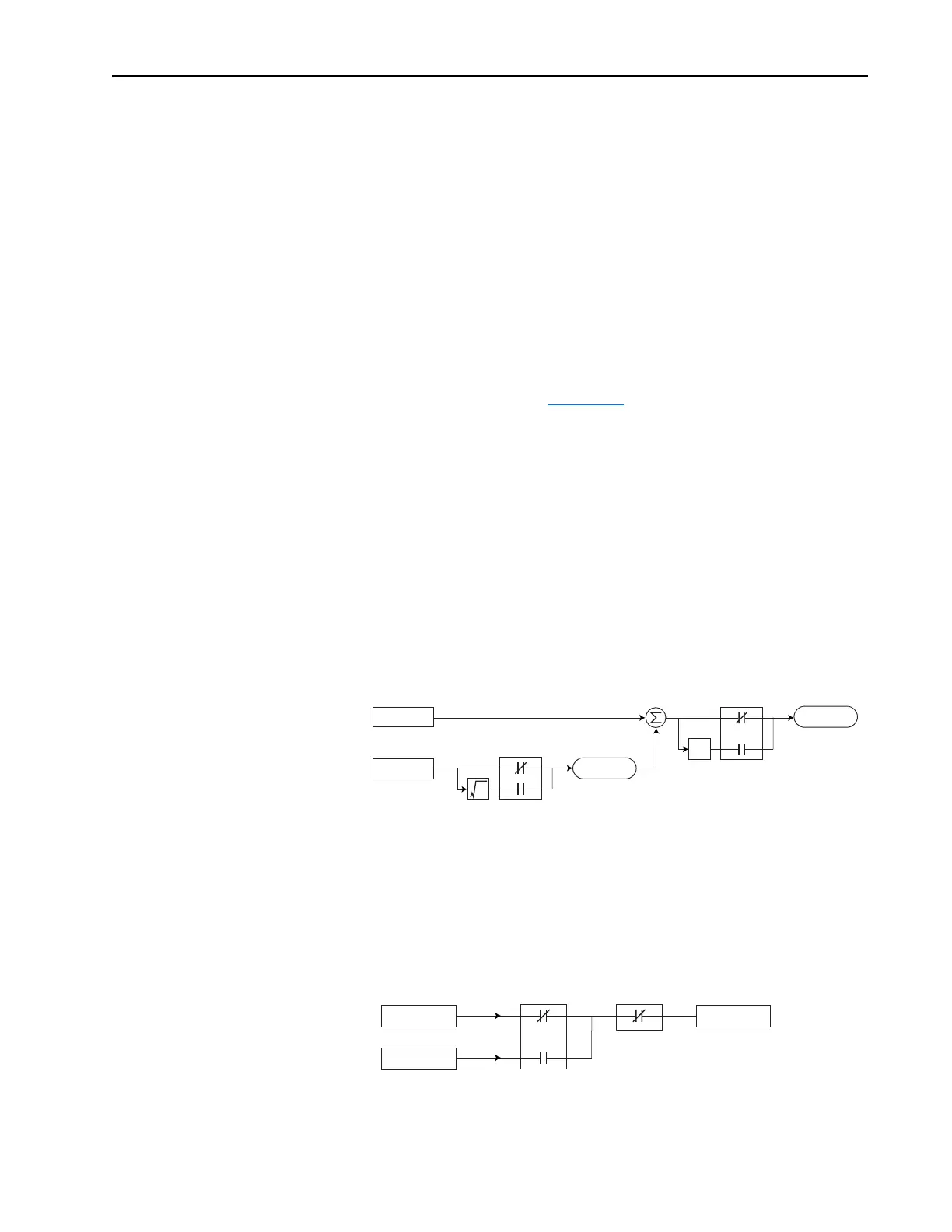
• Preload Integrator - This feature allows the PI Output to be stepped
to a preload value for better dynamic response when the PI Output is
enabled. Refer to diagram 2 below.
If PI is not enabled the PI Integrator may be initialized to the PI
Pre-load Value or the current value of the commanded speed. The
operation of Preload is selected in the PI Configuration parameter.
By default, Pre-load Command is off and the PI Load Value is zero,
causing a zero to be loaded into the integrator when the PI is disabled.
PI_Config
.Invert
-
PI_Config
.Sqrt
PI Error
PI Fbk
+
–
PI Ref Sel
PI Fdbk Sel
PI_Config
.PreloadCmd
PI_Status
.Enabled
Preload Value PI Integrator
Spd Cmd
 Loading...
Loading...









