POS MV V4 User Guide
Installation
Copyright © Applanix Corporation, 2009
2-49
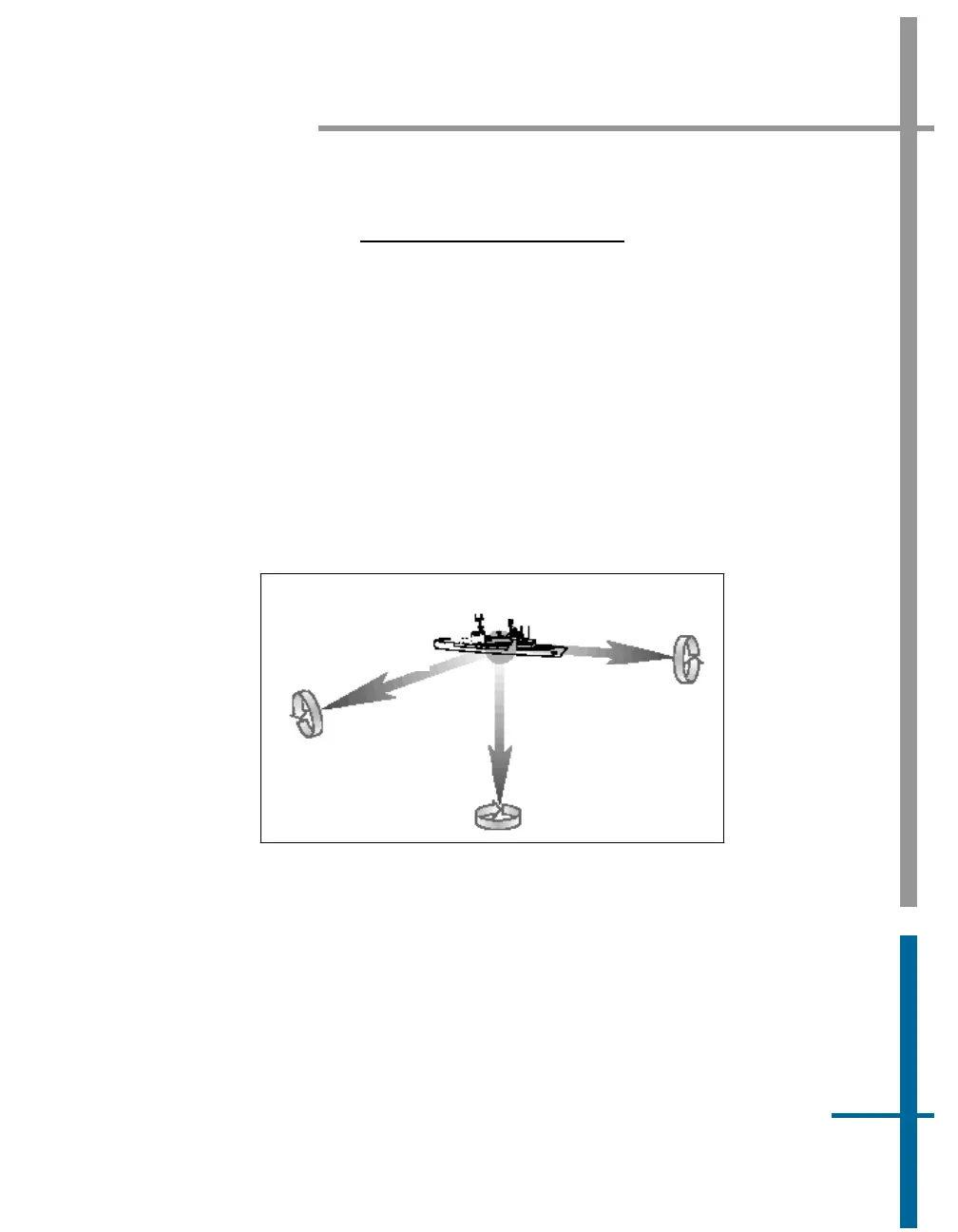
Right-Hand Orthogonal System
The right-hand orthogonal system defines the following:
• The x-axis is in the fore-aft direction in the appropriate
reference frame
• The y-axis is perpendicular to the x-axis and points towards
the right (starboard) side in the appropriate reference frame
• The z-axis points downwards in the appropriate reference
frame
Figure 15 shows an example of a frame centred on the vessel and
aligned with its surveyed fore-aft, port-starboard and vertical axis.
y = Horizonral
(port-stbd line)
x = Horizonral
(fore-aft line)
z = Vertical
Centre of
vessel
y
z
x
Figure 15: Right-Hand Orthogonal System
The mounting angles describe the relative angles between one frame and
another, for example between your reference frame and the IMU frame. The
following examples use the mounting angles between your chosen reference
frame and the IMU frame to illustrate how to measure and apply these
parameters.