C2 Series User Manual Rev. 1.9
15
C2 Series Operational Reference
Measuring Principle
The C2 camera acquires height profiles and height images based on the laser triangulation principle.
According to this method a laser line is projected on the object from one direction. The C2 camera
views the object from another angle defining the triangulation geometry. The resulting sensor image
is evaluated by the C2 camera core and converted into a single height profile. By scanning the laser
line over the object a complete height image can be acquired.
The figures below demonstrate some typical triangulation geometries. The following notation is used
in the approximation of height resolution:
ΔX= resolution along the laser line (lateral),
ΔY= resolution perpendicular to the laser line (longitudinal in the direction of motion),
ΔZ= height resolution.
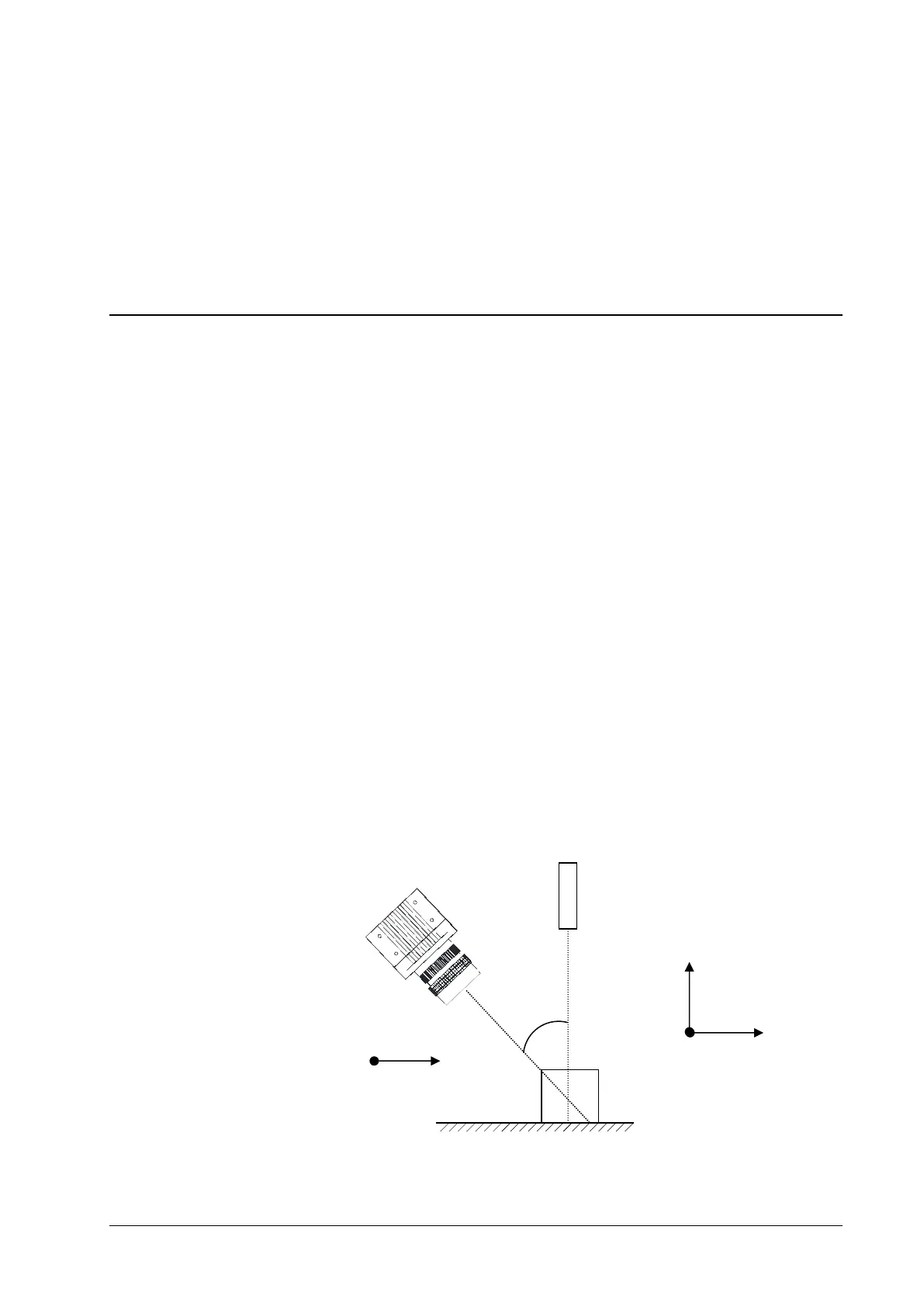
Geometry 1
The laser line is projected perpendicular to the object surface, while the camera views the object
under the triangulation angle α.
The height resolution can be approximated: ΔZ ≈ ΔX / sin(α)