0911 - 9
english
Starting from the measured temperature Ta, the set-value is increased in steps
by dSl, but the SOFT-Start will only begin when Ta is outside the drb range:
Dynamic set-value = Ta + dSI
The clock time indicates with dSt when the dynamic set-value is increased by
dSl.
The dynamic set-value is set to Set-value 1 if the amount dynamic
set-value - Set-value < drb:
If | current dynamic set-value - set-value 1 | > drb,
automatic default: Dynamic set-value = Set-value 1
The SOFT-Start is ended.
If the measured temperature of the belt exceeds or falls below drb, the SOFT-
Start starts again.
2.5 Proportional control
In the case of unsatisfactory controller results with factory parameters, we
recommend that you proceed as follows:
1. Enter the switch hysterisis mode for Output 1 (Ft = 0)
2. Set Set-value 1 to a value that will not endanger the installation though
excessive vibration, e.g., 10% below working temperature.
3. Set the switch hysterisis setting Par. Hy1) to 3 % of the working
temperature (Set-value 1).
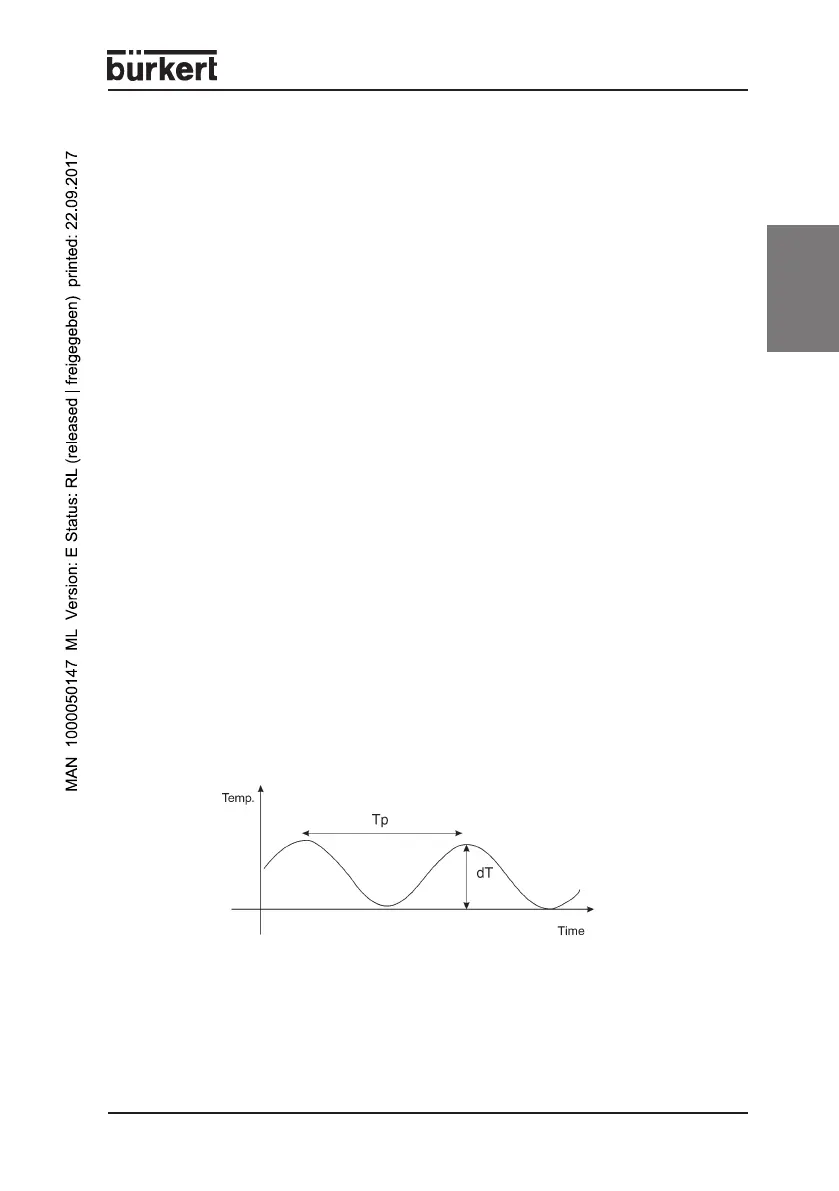
4. Start the system and wait until the vibration remains constant.
5. Evaluate (poss. using a plotter) the values Tp and dT
(see diagram)
6. Calculate the parameters Pb, Int, dEt, Cyt from these values -
as follows:
Pb = 2 x dT
Int = Tp / 2
dEt = Tp / 8
Cyt = Tp / 20